Simulación de un prototipo virtual de órtesis robótica para rodilla
DOI:
https://doi.org/10.37636/recit.v7n4e374Palabras clave:
Órtesis para rodilla, MSC Adams, Control de órtesis, Exoesqueleto de órtesisResumen
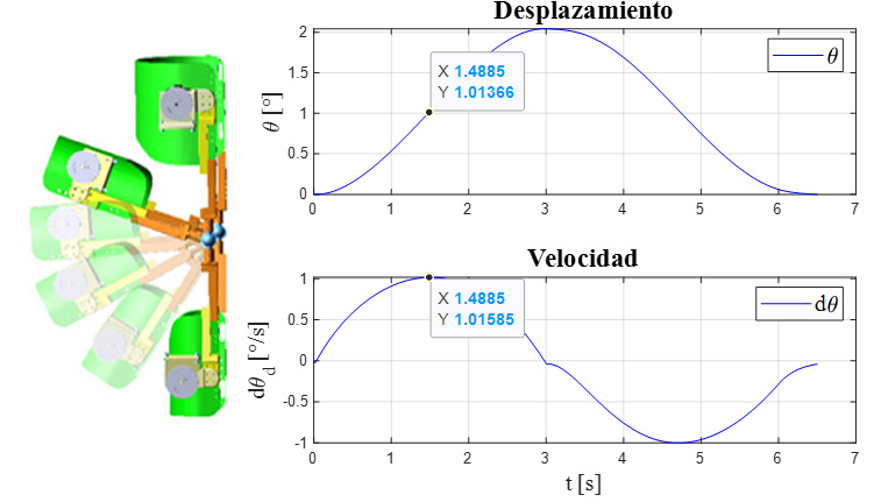
La complejidad en los movimientos de la actividad diaria que realizan las personas, origina que recurrentemente sufran de algún tipo de lesión en las extremidades (superiores/inferiores); siendo lo más común los daños en la articulación de la rodilla, afectando parcial o totalmente la movilidad. Estudios recientes indican que el empleo de dispositivos ortopédicos biomecánicos, como las órtesis, facilita la rehabilitación y acelera la recuperación de dichas lesiones. El principal objetivo del diseño de las órtesis para la rodilla es mejorar la movilidad, estabilidad y rigidez de la extremidad afectada. En este trabajo se presenta el proceso para la simulación de los movimientos de flexión y extensión de un prototipo virtual de una órtesis para rodilla, obteniendo como resultado la simulación y co-simulación entre MSC Adams® y Simulink-Matlab®. Para mostrar el proceso de simulación, se implementa un control tipo PID en el seguimiento de trayectorias del prototipo virtual de la órtesis de rodilla, utilizando un polinomio de Bézier. Los resultados muestran un buen desempeño en el seguimiento de trayectorias, obteniendo una trayectoria deseada de una flexión máxima de 2π/3 rad, con un error aproximado de 0.0124 radianes con respecto a la trayectoria deseada.
Descargas
Citas
A. Zissimopoulos, S. Fatone, and S. A. Gard, “Biomechanical and energetic effects of a stance-control orthotic knee joint,” The Journal of Rehabilitation Research and Development, vol. 44, no. 4, p. 503, 2007, doi: 10.1682/JRRD.2006.09.0124. DOI: https://doi.org/10.1682/JRRD.2006.09.0124
P. M. Vergara, R. M. Díaz, E. F. Rivas, and M. M. Restrepo, Diseño de dispositivos para rehabilitación y ortesis., 1st ed. Venezuela, 2017, URL: https://www.researchgate.net/publication/323971491_Diseno_de_dispositivos_para_rehabilitacion_y_ortesis
N. F. Vargas, “Indicaciones de las ortesis en atención primaria,” FMC, vol. 24, no. 8, pp. 465–478, Oct. 2017, doi: 10.1016/j.fmc.2017.02.010. DOI: https://doi.org/10.1016/j.fmc.2017.02.010
M. B. Popovic, “Powered Orthotics: Enabling Brace Technologies for Upper and Lower Limbs,” in Biomechatronics, Elsevier, 2019, pp. 279–303. doi: 10.1016/B978-0-12-812939-5.00010-0. DOI: https://doi.org/10.1016/B978-0-12-812939-5.00010-0
P. A. Villa, R. D. Delisle, J. Souza Lima, A. Frizera-Neto, and T. Bastos, “Knee Impedance Modulation to Control an Active Orthosis Using Insole Sensors,” Sensors, vol. 17, no. 12, p. 2751, Nov. 2017, doi: 10.3390/s17122751. DOI: https://doi.org/10.3390/s17122751
S. Hui, Chong Jiang, Yuliang Mao, and X. Wang, “Design and control of a wearable active knee orthosis for walking assistance,” in 2016 IEEE 14th International Workshop on Advanced Motion Control (AMC), IEEE, Apr. 2016, pp. 51–56. doi: 10.1109/AMC.2016.7496327. DOI: https://doi.org/10.1109/AMC.2016.7496327
P. Felix, J. Figueiredo, C. P. Santos, and J. C. Moreno, “Powered knee orthosis for human gait rehabilitation: First advances,” in 2017 IEEE 5th Portuguese Meeting on Bioengineering (ENBENG), IEEE, 2017, pp. 1–4. doi: 10.1109/ENBENG.2017.7889427. DOI: https://doi.org/10.1109/ENBENG.2017.7889427
E. Garcia, D. Sanz-Merodio, M. Cestari, M. Perez, and J. Sancho, “An Active Knee Orthosis for the Physical Therapy of Neurological Disorders,” 2016, pp. 327–337. doi: 10.1007/978-3-319-27149-1_26. DOI: https://doi.org/10.1007/978-3-319-27149-1_26
M. J. S. Lora, A. F. Hidalgo Romero, and E. Rocon de Lima, “Diseño de una órtesis activa de rodilla para la evaluación de algoritmos de asistencia robótica en sujetos hemiparéticos,” in Actas de las XXXIX Jornadas de Automática, Badajoz, 5-7 de septiembre de 2018, Universidade da Coruña. Servizo de Publicacións, Mar. 2020, pp. 57–63. doi: 10.17979/spudc.9788497497565.0057. DOI: https://doi.org/10.17979/spudc.9788497497565.0057
N. Karavas, A. Ajoudani, N. Tsagarakis, and D. Caldwell, “Human-inspired balancing assistance: Application to a knee exoskeleton,” in 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), IEEE, Dec. 2013, pp. 292–297. doi: 10.1109/ROBIO.2013.6739474. DOI: https://doi.org/10.1109/ROBIO.2013.6739474
F. Tian, M. S. Hefzy, and M. Elahinia, “State of the Art Review of Knee–Ankle–Foot Orthoses,” Ann Biomed Eng, vol. 43, no. 2, pp. 427–441, Feb. 2015, doi: 10.1007/s10439-014-1217-z. DOI: https://doi.org/10.1007/s10439-014-1217-z
S. A. Barrera et al., “State of the Art Review of Active and Passive Knee Orthoses,” Machines, vol. 10, no. 10, p. 865, Sep. 2022, doi: 10.3390/machines10100865. DOI: https://doi.org/10.3390/machines10100865
C. Zhao, Z. Liu, L. Zhu, and Y. Wang, “Design and Research of Series Actuator Structure and Control System Based on Lower Limb Exoskeleton Rehabilitation Robot,” Actuators, vol. 13, no. 1, p. 20, Jan. 2024, doi: 10.3390/act13010020. DOI: https://doi.org/10.3390/act13010020
R. MI and A. Osman NA, “Mechanically Actuated Stance-Control-Orthoses: Advantages, Design Evaluation and Future Directions,” J Pain Relief, vol. 04, no. 06, 2015, doi: 10.4172/2167-0846.1000211. DOI: https://doi.org/10.4172/2167-0846.1000211
A. K. Das, S. Sahoo, and D. K. Pratihar, “An Improved Design of Knee Orthosis Using Self-Adaptive Bonobo Optimizer (SaBO),” J Intell Robot Syst, vol. 107, no. 1, p. 8, Jan. 2023, doi: 10.1007/s10846-022-01802-1. DOI: https://doi.org/10.1007/s10846-022-01802-1
J.-H. Kim, S.-G. Ji, K.-J. Jung, and J.-H. Kim, “Therapeutic Experience on Stance Control Knee-Ankle-Foot Orthosis With Electromagnetically Controlled Knee Joint System in Poliomyelitis,” Ann Rehabil Med, vol. 40, no. 2, p. 356, 2016, doi: 10.5535/arm.2016.40.2.356. DOI: https://doi.org/10.5535/arm.2016.40.2.356
Y. Heo, H.-J. Choi, J.-W. Lee, H.-S. Cho, and G.-S. Kim, “Motion-Based Control Strategy of Knee Actuated Exoskeletal Gait Orthosis for Hemiplegic Patients: A Feasibility Study,” Applied Sciences, vol. 14, no. 1, p. 301, Dec. 2023, doi: 10.3390/app14010301. DOI: https://doi.org/10.3390/app14010301
M. D. S. Manchola, L. J. A. Mayag, M. Munera, and C. A. C. Garcia, “Impedance-based Backdrivability Recovery of a Lower-limb Exoskeleton for Knee Rehabilitation,” in 2019 IEEE 4th Colombian Conference on Automatic Control (CCAC), IEEE, Oct. 2019, pp. 1–6. doi: 10.1109/CCAC.2019.8921278. DOI: https://doi.org/10.1109/CCAC.2019.8921278
V. C. H. Guzmán, E. J. L. Carrera, O. A. Blanco, S. M. A. Oliver, and B. F. A. Gómez, “Diseño y control de un sistema interactivo para la rehabilitación de tobillo: TobiBot,” INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO, vol. 5, pp. 255–264, 2014, URL: https://www.scielo.org.mx/scielo.php?script=sci_arttext&pid=S1665-73812014000200003,
M. Alam, I. A. Choudhury, and A. Bin Mamat, “Mechanism and Design Analysis of Articulated Ankle Foot Orthoses for Drop-Foot,” The Scientific World Journal, vol. 2014, pp. 1–14, 2014, doi: 10.1155/2014/867869. DOI: https://doi.org/10.1155/2014/867869
J. F. Veneman, R. Ekkelenkamp, R. Kruidhof, F. C. T. van der Helm, and H. van der Kooij, “A Series Elastic- and Bowden-Cable-Based Actuation System for Use as Torque Actuator in Exoskeleton-Type Robots,” Int J Rob Res, vol. 25, no. 3, pp. 261–281, Mar. 2006, doi: 10.1177/0278364906063829. DOI: https://doi.org/10.1177/0278364906063829
J. F. Veneman, R. Kruidhof, E. E. G. Hekman, R. Ekkelenkamp, E. H. F. Van Asseldonk, and H. van der Kooij, “Design and Evaluation of the LOPES Exoskeleton Robot for Interactive Gait Rehabilitation,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 15, no. 3, pp. 379–386, Sep. 2007, doi: 10.1109/TNSRE.2007.903919. DOI: https://doi.org/10.1109/TNSRE.2007.903919
M. S. Cherry, D. J. Choi, K. J. Deng, S. Kota, and D. P. Ferris, “Design and Fabrication of an Elastic Knee Orthosis: Preliminary Results,” in Volume 2: 30th Annual Mechanisms and Robotics Conference, Parts A and B, ASMEDC, Jan. 2006, pp. 565–573. doi: 10.1115/DETC2006-99622. DOI: https://doi.org/10.1115/DETC2006-99622
J. Z. Chen and W. H. Liao, “Design, testing and control of a magnetorheological actuator for assistive knee braces,” Smart Mater Struct, vol. 19, no. 3, p. 035029, Mar. 2010, doi: 10.1088/0964-1726/19/3/035029. DOI: https://doi.org/10.1088/0964-1726/19/3/035029
M. J. Claros, R. Soto, J. L. Gordillo, J. L. Pons, and J. L. Contreras-Vidal, “Robotic Assistance of Human Motion Using Active-Backdrivability on a Geared Electromagnetic Motor,” Int J Adv Robot Syst, vol. 13, no. 2, p. 40, Mar. 2016, doi: 10.5772/62331. DOI: https://doi.org/10.5772/62331
B. Penzlin, M. E. Fincan, Y. Li, L. Ji, S. Leonhardt, and C. Ngo, “Design and Analysis of a Clutched Parallel Elastic Actuator,” Actuators, vol. 8, no. 3, p. 67, Sep. 2019, doi: 10.3390/act8030067. DOI: https://doi.org/10.3390/act8030067
J. Figueiredo, C. P. Santos, and J. C. Moreno, “Assistance and rehabilitation of gait disorders using active lower limb orthoses,” in 2015 IEEE 4th Portuguese Meeting on Bioengineering (ENBENG), IEEE, Feb. 2015, pp. 1–6. doi: 10.1109/ENBENG.2015.7088837. DOI: https://doi.org/10.1109/ENBENG.2015.7088837
I. A. Amaia, “Análisis dinámico de las fuerzas de contacto órtesis pierna mediante un modelo biomecánico tridimensional,” Tesis de Máster, Universitat Politécnica de Catalunya, Barcelona, 2014, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://biomec.upc.edu/wp-content/uploads/theses/Ilzarbe-MSc-Thesis-Analisis%20dinamico%20de%20las%20fuerzas%20de%20contacto%20ortesis-pierna%20mediante%20un%20modelo%20biomecanico%20tridimensional.pdf
S. A. Fesharaki et al., “The Effects of Knee Orthosis with Two Degrees of Freedom Joint Design on Gait and Sit-to-Stand Task in Patients with Medial Knee Osteoarthritis,” Sultan Qaboos University Medical Journal [SQUMJ], vol. 20, no. 4, pp. e324-331, Dec. 2020, doi: 10.18295/squmj.2020.20.04.008. DOI: https://doi.org/10.18295/squmj.2020.20.04.008
E. Lugo, P. Ponce, A. Molina, and S. Castro, “Co-simulación del Diseño Biomecánico para un Exoesqueleto Robótico del Miembro Inferior,” Revista Mexicana de Ingeniería Biomédica, vol. 2, pp. 143–156, Aug. 2014, URL: https://www.researchgate.net/publication/273327998_Co-simulacion_del_Diseno_Biomecanico_para_un_Exoesqueleto_Robotico_del_Miembro_Inferior
M. V. Urdaniz, M. A. Ortiz, A. A. Bonardi, and G. G. Gentiletti, “Diseño y Simulación de una Órtesis Robótica para Rehabilitación de la Marcha,” 2009, URL: https://www.researchgate.net/publication/242363654_Diseno_y_Simulacion_de_una_Ortesis_Robotica_para_Rehabilitacion_de_la_Marcha
L. Ángel, M. P. Pérez, Q. C. Díaz, and C. Mendoza, “ADAMS/MATLAB Co-Simulation: Dynamic Systems Analysis and Control Tool,” Applied Mechanics and Materials, vol. 232, pp. 527–531, Nov. 2012, doi: 10.4028/www.scientific.net/AMM.232.527. DOI: https://doi.org/10.4028/www.scientific.net/AMM.232.527
R. J. Pulles, “Controller design for ADAMS models using Matlab/SIMULINK interaction,” Technische Universiteit Eindhoven., 2003, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://pure.tue.nl/ws/files/4339937/614916.pdf
O. C. Chávez, E. Rubio, and C. Guzmán, “Study of dynamic simulators with ADAMS and Matlab/Simulink for control systems,” Revista Internacional de Métodos Numéricos para Cálculo y Diseño en Ingeniería, vol. 38, no. 1, 2022, doi: 10.23967/j.rimni.2022.04.001. DOI: https://doi.org/10.23967/j.rimni.2022.04.001
A. S. Nair and D. Ezhilarasi, “Performance Analysis of Super Twisting Sliding Mode Controller by ADAMS–MATLAB Co-simulation in Lower Extremity Exoskeleton,” International Journal of Precision Engineering and Manufacturing-Green Technology, vol. 7, no. 3, pp. 743–754, May 2020, doi: 10.1007/s40684-020-00202-w. DOI: https://doi.org/10.1007/s40684-020-00202-w
R. López, H. Aguilar, S. Salazar, R. Lozano, and J. A. Torres, “Modelado y Control de un Exoesqueleto para la Rehabilitación de Extremidad Inferior con dos grados de libertad,” Revista Iberoamericana de Automática e Informática Industrial RIAI, vol. 11, no. 3, pp. 304–314, Jul. 2014, doi: 10.1016/j.riai.2014.02.008. DOI: https://doi.org/10.1016/j.riai.2014.02.008
Craig J., Introduction to Robotics (Mechanics and Control), 2nd edition. 1989, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://marsuniversity.github.io/ece387/Introduction-to-Robotics-Craig.pdf
Selig J., Introductory Robotics . 1992, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/http://www.robot.bmstu.ru/files/books/Robotic%20-%20Introductory%20Robotics%20-%20Prentice%20Hall%201992.pdf
S. M. A. Romero, “Diseño y Construcción de una Órtesis de Rodilla, Destinada a la Rehabilitación Automatizada de la Extremidad Inferior.” Universidad Politécnica Salesiana, Cuenca, 2012, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://dspace.ups.edu.ec/bitstream/123456789/2814/1/UPS-CT002463.pdf
P. Y. Torres, “Evaluación cuantitativa de una prótesis de miembro inferior unilateral,” Tesis, Universidad Distrital Francisco José de Caldas, Bogotá, Colombia., 2005, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://repositorio.uniandes.edu.co/server/api/core/bitstreams/abc58095-385f-4305-bcc4-1d01f66a4362/content
J. D. Boyling, “A Review of: ‘The Biomechanics and Motor Control of Human Gait’ By DAVID A. WINTER. (University of Waterloo Press, Waterloo, Canada, 1987.) [Pp. 72.],” Ergonomics, vol. 32, no. 4, pp. 453–453, Apr. 1989, doi: 10.1080/00140138908966114. DOI: https://doi.org/10.1080/00140138908966114
D. Knundson, Fundamentals of Biomechanics. Boston, MA: Springer US, 2007. doi: 10.1007/978-0-387-49312-1. DOI: https://doi.org/10.1007/978-0-387-49312-1
F. Ferryanto, I. Herman, S. Mihradi, T. Dirgantara, and A. I. Mahyuddin, “Development of a 3D Gait Measurement Protocol for Amputees Walking on Treadmill,” MESIN, vol. 26, no. 1, pp. 29–39, Apr. 2017, doi: 10.5614/MESIN.2017.26.1.4. DOI: https://doi.org/10.5614/MESIN.2017.26.1.4
M. Khosravi, M. Jalali, T. Babaee, M. Ali Sanjari, and A. Rahimi, “Evaluating the effective pressure applied by a valgus knee orthosis in individuals with medial knee osteoarthritis based on the dose–response relationship,” Knee, vol. 40, pp. 174–182, Jan. 2023, doi: 10.1016/j.knee.2022.11.002. DOI: https://doi.org/10.1016/j.knee.2022.11.002
R. Dwarakanathan, R. K. Mohanty, S. Sahoo, and S. Prasad, “Efficacy of unloader knee orthosis and lateral wedge insole on static balance in medial knee osteoarthritis,” Journal of Orthopaedics, Trauma and Rehabilitation, vol. 29, no. 1, p. 221049172210952, Jun. 2022, doi: 10.1177/22104917221095256. DOI: https://doi.org/10.1177/22104917221095256
O. A. Blanco, B. F. A. Gomez, L. G. V. Valdes, and R. O. D. Arcega, “A Generalized Proportional Integral Controller for an Ankle Rehabilitation Machine Based on an XY Table,” in 2013 International Conference on Mechatronics, Electronics and Automotive Engineering, IEEE, Nov. 2013, pp. 152–157. doi: 10.1109/ICMEAE.2013.24. DOI: https://doi.org/10.1109/ICMEAE.2013.24
O. A. Blanco, B. R. F. Vázquez, V. G. Vela, M. E. Quintero, and L. G. López, “Control of a virtual prototype of an ankle rehabilitation machine,” Revista Facultad de Ingeniería Universidad de Antioquia, no. 67, pp. 183–196, Aug. 2013, doi: 10.17533/udea.redin.16321. DOI: https://doi.org/10.17533/udea.redin.16321
Publicado
Cómo citar
Número
Sección
Categorías
Licencia
Derechos de autor 2024 Agustín Barrera Sánchez, Héctor Ramón Azcaray Rivera, Andrés Blanco Ortega, Rafael Campos Amezcua, Arturo Abúndez Pliego, Jhonatan Isidro Godoy

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores/as que publiquen en esta revista aceptan las siguientes condiciones:
- Los autores/as conservan los derechos de autor y ceden a la revista el derecho de la primera publicación, con el trabajo registrado con la licencia de atribución de Creative Commons 4.0, que permite a terceros utilizar lo publicado siempre que mencionen la autoría del trabajo y a la primera publicación en esta revista.
- Los autores/as pueden realizar otros acuerdos contractuales independientes y adicionales para la distribución no exclusiva de la versión del artículo publicado en esta revista (p. ej., incluirlo en un repositorio institucional o publicarlo en un libro) siempre que indiquen claramente que el trabajo se publicó por primera vez en esta revista.
- Se permite y recomienda a los autores/as a compartir su trabajo en línea (por ejemplo: en repositorios institucionales o páginas web personales) antes y durante el proceso de envío del manuscrito, ya que puede conducir a intercambios productivos, a una mayor y más rápida citación del trabajo publicado (vea The Effect of Open Access).