Design, construction and control of a novel ankle rehabilitation device
DOI:
https://doi.org/10.37636/recit.v7n3e359Keywords:
Rehabilitation system, Ankle rehabilitator, Virtual prototype, PID controllerAbstract
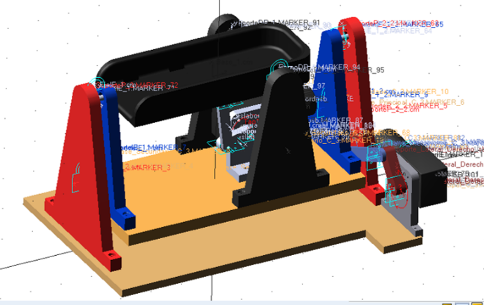
A novel two-degree-of-freedom ankle rehabilitation device was designed and simulated in this work. The device was designed based on both the anthropometric measurements of the Mexican population and the natural kinematics of the ankle joint during walking; therefore, allows reproducing the dorsiflexion - plantarflexion and eversion - inversion movements. The virtual prototype of the ankle rehabilitator was simulated in MSC Adams® to determine the dynamic response by implementing Proportional - Integral control techniques for each movement. The simulation results show that the prototype achieves a maximum and minimum range of motion that precisely matches the anthropometric parameters of the ankle. This behaviour is observed by maintaining the motors operating at a constant speed, which is crucial to ensure stability and accuracy in the performance of the device. The rehabilitator, driven by two geared motors driving four-bar mechanisms, allows simple movements, as well as dorsi/plantarflexion and inversion/eversion combinations to be performed simultaneously.
Downloads
References
N. Rehmat, J. Zuo, W. Meng, Q. Liu, S. Q. Xie, and H. Liang, “Upper limb rehabilitation using robotic exoskeleton systems: a systematic review,” Int J Intell Robot Appl, vol. 2, no. 3, pp. 283–295, Sep. 2018, doi: 10.1007/s41315-018-0064-8. DOI: https://doi.org/10.1007/s41315-018-0064-8
H. S. Lo and S. Q. Xie, “Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects,” Medical Engineering and Physics, vol. 34, no. 3. pp. 261–268, Apr. 2012. doi: 10.1016/j.medengphy.2011.10.004. DOI: https://doi.org/10.1016/j.medengphy.2011.10.004
E. Pérez. (6, sep, 2019). Análisis sobre la situación de la fisioterapia en su Día Mundial. [Online]. Available: https://efesalud.com
H. C. Hsieh, D. F. Chen, L. Chien, and C. C. Lan, “Design of a Parallel Actuated Exoskeleton for Adaptive and Safe Robotic Shoulder Rehabilitation,” IEEE/ASME Transactions on Mechatronics, vol. 22, no. 5, pp. 2034–2045, Oct. 2017, doi: 10.1109/TMECH.2017.2717874. DOI: https://doi.org/10.1109/TMECH.2017.2717874
N. Zhetenbayev, A. Zhauyt, G. Balbayev, and B. Shingissov, “Robot device for ankle joint rehabilitation: A review,” in Vibroengineering Procedia, Apr. 2022, pp. 96–102. doi: 10.21595/vp.2022.22507. DOI: https://doi.org/10.21595/vp.2022.22507
C. W. Chan and A. Rudins, “Foot Biomechanics During Walking and Running,” Mayo Clinic Proceedings, vol. 69, no. 5. pp. 448–461, 1994. doi: 10.1016/S0025-6196(12)61642-5. DOI: https://doi.org/10.1016/S0025-6196(12)61642-5
D. R. Ferreira, C. K. Baptista, B. da S. Rodrigues, B. C. Siqueira, S. M. Blascovi-Assis, and A. G. Corrêa, “Development and Test of a Serious Game for Dorsiflexion and Plantarflexion Exercises of the Feet,” Journal on Interactive Systems, vol. 12, no. 1, pp. 58–68, Aug. 2021, doi: 10.5753/jis.2021.1916. DOI: https://doi.org/10.5753/jis.2021.1916
W. M. Alcocer Rosado, L. G. Vela Valdes, A. Blanco Ortega, J. Ruiz Ascencio, and C. D. Garcia Beltran, “Passive Rehabilitation Exercises with an Ankle Rehabilitation Prototype Based in a Robot Parallel Structure,” IEEE Latin America Transactions, vol. 15, no. 1, pp. 48–56, Jan. 2017, doi: 10.1109/TLA.2017.7827887. DOI: https://doi.org/10.1109/TLA.2017.7827887
K. Bharadwaj, T. G. Sugar, J. B. Koeneman, and E. J. Koeneman, “Design of a robotic gait trainer using spring over muscle actuators for ankle stroke rehabilitation,” J Biomech Eng, vol. 127, no. 6, pp. 1009–1013, Nov. 2005, doi: 10.1115/1.2049333. DOI: https://doi.org/10.1115/1.2049333
C. E. Syrseloudis and I. Z. Emiris, “A parallel robot for ankle rehabilitation-evaluation and its design specifications,” in 8th IEEE International Conference on BioInformatics and BioEngineering, BIBE 2008, 2008. doi: 10.1109/BIBE.2008.4696826. DOI: https://doi.org/10.1109/BIBE.2008.4696826
A. Pino, D. Gómez Vargas ,A. Garzón , F.Roberti ,R. Carelli “Mirror-Based Robotic Therapy for Ankle Recovery with a Serious Game: A Case Study with a Neurological Patient,” IEEE International Conference on Rehabilitation Robotics, vol. 2022-July, 2022, doi: 10.1109/ICORR55369.2022.9896510. DOI: https://doi.org/10.1109/ICORR55369.2022.9896510
A. D. Pino López, C. A. Cifuentes García, M. C. Múnera Ramírez, “Development of a Serious Game for Ankle Rehabilitation with T-FLEX.” Trabajo Fin de Máster, Universidad Del Rosario Dec. 2020, doi:/10.48713/10336_30723.
L. A. Harvey, L. Brosseau, and R. D. Herbert, “Continuous passive motion following total knee arthroplasty in people with arthritis,” Cochrane Database of Systematic Reviews, vol. 2014, no. 2, Feb. 2014, doi: 10.1002/14651858.CD004260. DOI: https://doi.org/10.1002/14651858.CD004260.pub3
A. Blanco Ortega, R. Fabián Vázquez Bautista, G. Vela-Váldes, E. Quintero Marmol, and G. López López, “Control de un prototipo virtual de una máquina de rehabilitación de tobillo Control of a virtual prototype of an ankle rehabilitation machine,” Revista Facultad de Ingeniería Universidad de Antioquia núm. 67, abril-junio, 2013, pp. 183-196. DOI: https://doi.org/10.17533/udea.redin.16321
A. Blanco-Ortega, H. Azcaray, and L. Gerardo Vela Valdés, “Prototipo virtual de un rehabilitador de tobillo,” CIINDET 2011, Cuernavaca, Morelos, México.
A.K.Gama Velasco , “Desarrollo de un sistema interactivo basado en visión artificial para la rehabilitación del tobillo,” Tesis de Maestría, Tecnológico Nacional de México/Cenidet,Cuernavaca, Morelos, 2018.
P. Á. Romeo, L. Enrique, and M. Gella, “Control de impedancia de un exoesqueleto de extremidades inferiores” Trabajo Fin de Máster Universidad de Zaragoza, EINA, 2017.
F. A. Gómez-Becerra, A. Blanco-Ortega, and L. Gerardo, “Diseño y control de Rehabilitador de tobillo basado en una Mesa XY,” Ciencia e Investigación, nov. 05, 2012.
N. C. Ruiz Hidalgo, A. Blanco Ortega, L. Gerardo Vela Valdés, and A. Abúndez Pliego, “Guía Control Mioeléctrico de un Rehabilitador de Tobillo,” Tesis de Maestría, Tecnológico Nacional de México/Cenidet, Cuernavaca, Morelos 2014.
A. Cobo Viteri, “Diseño mecánico de un equipo para rehabilitación física de tobillo, por medio de un sistema de motores eléctricos y plataforma móvil,”Tesis de Maestría, ESPOCH, Riobamba, Ecuador, 2018.
M. Angel, and G. Velarde,” P. Rehabilitador De Tobillo, T. Grados De Libertad” Tesis de Maestría, Tecnológico Nacional de México/cenidet, Cuernavaca, Morelos ,2019.
A. Barrera Sánchez “Adecuación y diseño de rutinas para la rehabilitación pasiva de tobillo con un prototipo de tres grados de libertad,” Tesis de Maestría, Tecnológico Nacional de México/Cenidet, Cuernavaca, Morelos, 2021.
C. H. Guzmán Valdivia, J. L. Carrera Escobedo, A. Blanco Ortega, M. A. Oliver Salazar, and F. A. Gómez Becerra, “Diseño y control de un sistema interactivo para la rehabilitación de tobillo: TobiBot,” Ingeniería mecánica, tecnología y desarrollo, vol. 5, no. 1, pp. 255–264, 2014, Accessed: Feb. 06, 2024.
M. Dong,Y.zhou,X.Rong, “State of the art in parallel ankle rehabilitation robot: a systematic review,” Journal of NeuroEngineering and Rehabilitation, vol. 18, no. 1. BioMed Central Ltd, Dec. 01, 2021. doi: 10.1186/s12984-021-00845-z. DOI: https://doi.org/10.1186/s12984-021-00845-z
M. G. Alvarez-Perez, M. A. Garcia-Murillo, and J. J. Cervantes-Sánchez, “Robot-assisted ankle rehabilitation: a review,” Disability and Rehabilitation: Assistive Technology, vol. 15, no. 4. Taylor and Francis Ltd, pp. 394–408, May 18, 2020. doi: 10.1080/17483107.2019.1578424. DOI: https://doi.org/10.1080/17483107.2019.1578424
D. Cioi, A. Kale, Grigore Burdea, J. Engsberg, W. Janes, and S. Ross, “Ankle control and strength training for children with cerebral palsy using the Rutgers Ankle CP,” PubMed, Jun. 2011, doi:10.1109/icorr.2011.5975432. DOI: https://doi.org/10.1109/ICORR.2011.5975432
S. Pittaccio, L. Garavaglia, C. Ceriotti, and F. Passaretti, “The use of dynamic systems based on shape memory alloys for the treatment of neuromuscular disorders,” in IFAC-PapersOnLine, Sep. 2015, pp. 189–194. doi: 10.1016/j.ifacol.2015.10.137. DOI: https://doi.org/10.1016/j.ifacol.2015.10.137
IEEE Computer Society, Institute of Electrical and Electronics Engineers, and Instituto Politécnico do Cávado e do Ave, SeGAH 2014: IEEE 3rd International Conference on Serious Games and Applications for Health: book of proceedings: Rio de Janeiro, Brazil, May 14-16.
A. Roy, L. W. Forrester, and R. F. Macko, “Short-term ankle motor performance with ankle robotics training in chronic hemiparetic stroke,” J Rehabil Res Dev, vol. 48, no. 4, pp. 417–430, 2011, doi: 10.1682/JRRD.2010.04.0078. DOI: https://doi.org/10.1682/JRRD.2010.04.0078
Y. Ren, Y. N. Wu, C. Y. Yang, T. Xu, R. L. Harvey, and L. Q. Zhang, “Developing a Wearable Ankle Rehabilitation Robotic Device for in-Bed Acute Stroke Rehabilitation,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 25, no. 6, pp. 589–596, Jun. 2017, doi: 10.1109/TNSRE.2016.2584003. DOI: https://doi.org/10.1109/TNSRE.2016.2584003
C. Zöch, V. Fialka-Moser, M. Quittan, “Rehabilitation of ligamentous ankle injuries: a review of recent studies”, Br J Sports Med, vol. 37, nº 4, p. 291–295, 2003. DOI: https://doi.org/10.1136/bjsm.37.4.291
A. Canosa, “Protocolos de recuperación funcional en el esguince del ligamento lateral externo de la articulación del tobillo”, universidad de A Coruña, pp. 123- 128, 2012.
R. L. Monteiro, C. D. Sartor, J. S. S. P. Ferreira, M. G. B. Dantas, S. A. Buss, I. C. N. Sacco, “Protocol for evaluating the effects of a foot-ankle therapeutic exercise program on daily activity, foot-ankle functionality, and biomechanics in people with diabetic polyneuropathy: a randomized controlled trial”, Department of Physical Therapy, Speech, and Occupational Therapy, School of Medicine, University of São Paulo, São Paulo, Brazil, 2018. DOI: https://doi.org/10.1186/s12891-018-2323-0
H. Jansen, M. Jordan, S. Frey, S. Hölscher-Doht1, R. Meffert, T. Heintel, “Active controlled motion in early rehabilitation improves outcome after ankle fractures: a randomized controlled trial”, Clinical Rehabilitation, 2018, Vol. 32(3) 312–318 DOI: https://doi.org/10.1177/0269215517724192
S. Nakao, T. Ikezoe, M. Nakamura, J. Saeki, T. Kato, J. Umehara, N. Ichihashi, “Effects of ankle position during static stretching for the hamstrings on the decrease in passive stiffness”, Human Health Sciences, Graduate School of Medicine, Kyoto University, 2019. DOI: https://doi.org/10.1016/j.jbiomech.2019.109358
Downloads
Published
Issue
Section
Categories
License
Copyright (c) 2024 Salomón Blanco-Figueroa, Arturo Abúndez-Pliego, Andrés Blanco-Ortega, Fernanda De Jesús-Ramírez, Yunel Loeza de la Cruz

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors who publish in this journal accept the following conditions:
The authors retain the copyright and assign to the journal the right of the first publication, with the work registered with the Creative Commons Attribution license 4.0, which allows third parties to use what is published as long as they mention the authorship of the work and the first publication in this magazine.
Authors may make other independent and additional contractual agreements for the non-exclusive distribution of the version of the article published in this journal (eg, include it in an institutional repository or publish it in a book) as long as they clearly indicate that the work it was first published in this magazine.
Authors are allowed and encouraged to share their work online (for example: in institutional repositories or personal web pages) before and during the manuscript submission process, as it can lead to productive exchanges, greater and more quick citation of published work (see The Effect of Open Access).
How to Cite