Interfaz gráfica para el control de seguimiento de trayectorias de un robot sanitizador en espacios controlados
DOI:
https://doi.org/10.37636/recit.v44353364Palabras clave:
Interfaz gráfica de usuario, Robot desinfectante, Modelo simulado del robot, Planificación de trayectorias y seguimiento de trayectoriasResumen
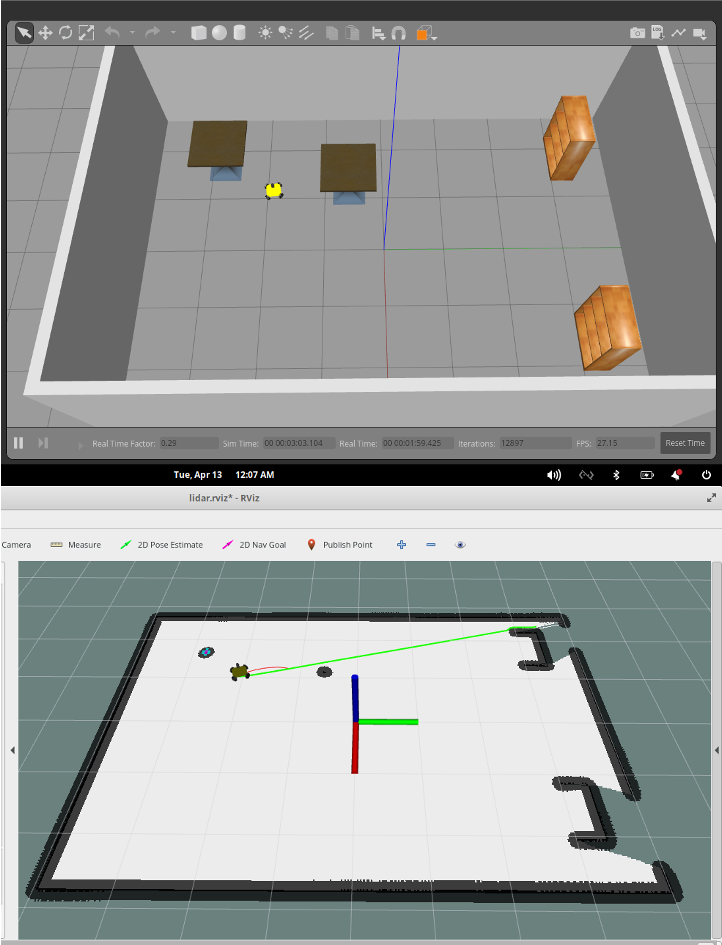
En el presente trabajo se propone un Desarrollo de Interfaz Gráfica de Usuario para la interacción con un modelo de simulación tridimensional de un robot higienizador en una sala simulada para las pruebas de algoritmos de navegación implementados en el mismo. Al mismo tiempo, se implementan los comportamientos de exploración y planificación de rutas de desinfección. El modelo simulado del robot se basa en la Rueda Omnidireccional Nexus 4WOmni de la que también se propone el modelo cinemático. Además, se propone una interfaz gráfica de usuario para dar comandos básicos al robot simulado. Los resultados de la implementación se comprueban mediante la implementación de algoritmos de navegación al robot, también los comportamientos de exploración, planificación de rutas y seguimiento de trayectoria de desinfección e interacción de la interfaz gráfica con la simulación.
Descargas
Citas
D. Conte, S. Leamy, and T. Furukawa, "Design and Map-based Teleoperation of a Robot for Disinfection of COVID-19 in Complex Indoor Environments," 2020 IEEE Int. Symp. Safety, Secur. Rescue Robot. SSRR 2020, pp. 276-282, 2020. https://doi.org/10.1109/SSRR50563.2020.9292625. DOI: https://doi.org/10.1109/SSRR50563.2020.9292625
W. Chanprakon, P., Sae-Oung, T., Treebupachatsakul, T., Hannanta-Anan, P., Piyawattanametha, "An Ultra-violet sterilization robot for desinfection," 5th Int. Conf. Eng. Appl. Sci. Technol., vol. 5, pp. 44-47, 2019. https://doi.org/10.1109/ICEAST.2019.8802528 DOI: https://doi.org/10.1109/ICEAST.2019.8802528
A. Ray and H. Ray, "PSLB: Portable Sanitization Locomotive Bot," 2020 4th Int. Conf. Electron. Mater. Eng. Nano-Technology, IEMENTech 2020, 2020. https://doi.org/10.1109/IEMENTech51367.2020.9270096 DOI: https://doi.org/10.1109/IEMENTech51367.2020.9270096
A. Vyshnavi, A. Manasa, C. Hamsika, and P. Shalini, "UV Disinfection Robot with Automatic Switching on Human Detection," EAI Endorsed Trans. Internet Things, vol. 6, no. 23, p. 166364, 2020. https://doi.org/10.4108/eai.25-9-2020.166364 DOI: https://doi.org/10.4108/eai.25-9-2020.166364
D. Hu, H. Zhong, S. Li, J. Tan, and Q. He, "Segmenting areas of potential contamination for adaptive robotic disinfection in built environments," Build. Environ., vol. 184, no. June, 2020. https://doi.org/10.1016/j.buildenv.2020.107226 DOI: https://doi.org/10.1016/j.buildenv.2020.107226
M. A. V. J. Muthugala, S. M. B. P. Samarakoon, M. M. Rayguru, B. Ramalingam, and M. R. Elara, "Wall-following behavior for a disinfection robot using type 1 and type 2 fuzzy logic systems," Sensors (Switzerland), vol. 20, no. 16, pp. 1-22, 2020. https://doi.org/10.3390/s20164445 DOI: https://doi.org/10.3390/s20164445
A. E. M. de Alba, M. B. Rubio, M. E. Morán-Diez, C. Bernabéu, R. Hermosa, and E. Monte, "Microbiological evaluation of the disinfecting potential of UV-C and UV-C plus ozone generating robots," Microorganisms, vol. 9, no. 1, pp. 1-12, 2021. https://doi.org/10.3390/microorganisms9010172 DOI: https://doi.org/10.3390/microorganisms9010172
L. Tiseni, D. Chiaradia, M. Gabardi, M. Solazzi, D. Leonardis, and A. Frisoli, "UV-C Mobile Robots with Optimized Path Planning: Algorithm Design and On-Field Measurements to Improve Surface Disinfection against SARS-CoV-2," IEEE Robot. Autom. Mag., vol. 28, no. 1, 2021. https://doi.org/10.1109/MRA.2020.3045069 DOI: https://doi.org/10.1109/MRA.2020.3045069
A. Phunopas and S. Inoue, "Motion Improvement of Four-Wheeled Omnidirectional Mobile Robots for Indoor Terrain," Proc. Int. Conf. Artif. Life Robot., vol. 22, no. 4, pp. 607-612, 2017. https://doi.org/10.5954/ICAROB.2017.GS3-1 DOI: https://doi.org/10.5954/ICAROB.2017.GS3-1
V. N. T. Thanh et al., "Autonomous navigation for omnidirectional robot based on deep reinforcement learning," Int. J. Mech. Eng. Robot. Res., vol. 9, no. 8, 2020. https://doi.org/10.18178/ijmerr.9.8.1134-1139 DOI: https://doi.org/10.18178/ijmerr.9.8.1134-1139
A. Afzal, D. S. Katz, C. Le Goues, and C. S. Timperley, "A Study on the Challenges of Using Robotics Simulators for Testing," 2020. Accessed: Apr. 11, 2021. [Online]. Available: https://discourse.ros.org.
A. Filotheou, E. Tsardoulias, A. Dimitriou, A. Symeonidis, and L. Petrou, "Quantitative and Qualitative Evaluation of ROS-Enabled Local and Global Planners in 2D Static Environments," J. Intell. Robot. Syst. Theory Appl., vol. 98, no. 3-4, pp. 567-601, 2020. https://doi.org/10.1007/s10846-019-01086-y DOI: https://doi.org/10.1007/s10846-019-01086-y
I. Noreen, A. Khan, K. Asghar, and Z. Habib, "A path-planning performance comparison of RRT*-AB with MEA* in a 2-Dimensional Environment," Symmetry (Basel)., vol. 11, no. 7, 2019. https://doi.org/10.3390/sym11070945 DOI: https://doi.org/10.3390/sym11070945
B. Tang, K. Hirota, J. Wang, Y. Dai, and Z. Jia, "An Improved Dynamic Window Approach for Intelligent Pedestrian Avoidance of Mobile Robot," 2020. Accessed: Apr. 06, 2021. [Online]. Available: https://isciia2020.bit.edu.cn/docs/20201114080545836985.pdf.
B. Cybulski, A. Wegierska, and G. Granosik, "Accuracy comparison of navigation local planners on ROS-based mobile robot," in 12th International Workshop on Robot Motion and Control, RoMoCo 2019 - Workshop Proceedings, 2019, pp. 104-111. https://doi.org/10.1109/RoMoCo.2019.8787346 DOI: https://doi.org/10.1109/RoMoCo.2019.8787346
A. A. Gelan, "AUTONOMOUS SEARCH AND RESCUE ROBOT USING ROS PLATFORM," NEAR EAST UNIVERSITY, 2019. http://docs.neu.edu.tr/library/6813958828.pdf
H. Q. T. Ngo, V. N. Le, V. D. N. Thien, T. P. Nguyen, and H. Nguyen, "Develop the socially human-aware navigation system using dynamic window approach and optimize cost function for autonomous medical robot," Adv. Mech. Eng., vol. 12, no. 12, 2020. https://doi.org/10.1177/1687814020979430 DOI: https://doi.org/10.1177/1687814020979430
M. Pittner, M. Hiller, F. Particke, L. Patiño-Studencki, and J. Thielecke, "Systematic analysis of global and local planners for optimal trajectory planning," 2018. https://ieeexplore.ieee.org/abstract/document/8470582
P. Sooryavanshi, S. Upganlawar, and A. Bhosle, "Implementation of node.js server on Raspberry pi to control a remote vehicle for defense use," in Proceedings of the International Conference on Intelligent Sustainable Systems, ICISS 2017, Jun. 2018, pp. 816-819. https://doi.org/10.1109/ISS1.2017.8389290 DOI: https://doi.org/10.1109/ISS1.2017.8389290
R. Cruz, L. Garrote, A. Lopes, and U. J. Nunes, "Modular software architecture for human-robot interaction applied to the InterBot mobile robot," in 18th IEEE International Conference on Autonomous Robot Systems and Competitions, ICARSC 2018, Jun. 2018, pp. 17-23. https://doi.org/10.1109/ICARSC.2018.8374154 DOI: https://doi.org/10.1109/ICARSC.2018.8374154
M. Ily, L. Roman, and E. Magid, "Development of a graphical user interface for a crawler mobile robot servosila engineer," in Proceedings - International Conference on Developments in eSystems Engineering, DeSE, Feb. 2019, vol. 2018-Septe, pp. 192-197. https://doi.org/10.1109/DeSE.2018.00044 DOI: https://doi.org/10.1109/DeSE.2018.00044
K. Miatliuk, A. Nawrocka, K. Holewa, and V. Moulianitis, "Conceptual Design of BCI for Mobile Robot Control," https://doi.org/10.3390/app10072557 DOI: https://doi.org/10.3390/app10072557
D. Gego, C. Carreto, and L. Figueiredo, "Teleoperation of a mobile robot based on eye-gaze tracking," Jul. 2017. https://doi.org/10.23919/CISTI.2017.7975673 DOI: https://doi.org/10.23919/CISTI.2017.7975673
Y. H. Chen and K. T. Song, "Voice control design of a mobile robot using shared-control approach," in 2017 IEEE International Conference on Systems, Man, and Cybernetics, SMC 2017, Nov. 2017, vol. 2017-Janua, pp. 105-110. DOI: https://doi.org/10.1109/SMC.2017.8122586
https://doi.org/10.1109/SMC.2017.8122586 DOI: https://doi.org/10.1109/SMC.2017.8122586
S. Sharan, T. Q. Nguyen, P. Nauth, and R. Araujo, "Implementation and testing of voice control in a mobile robot for navigation," in IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM, Jul. 2019, vol. 2019-July, pp. 145-150. https://doi.org/10.1109/AIM.2019.8868892 DOI: https://doi.org/10.1109/AIM.2019.8868892
S. Pleshkova, Z. Zahariev, and A. Bekiarski, "Development of Speech Recognition Algorithm and LabView Model for Voice Command Control of Mobille Robot Motio," Dec. 2018. https://doi.org/10.1109/HiTech.2018.8566257 DOI: https://doi.org/10.1109/HiTech.2018.8566257
G. Bai, L. Liu, Y. Meng, W. Luo, Q. Gu, and J. Wang, "Path Tracking of Wheeled Mobile Robots Based on Dynamic Prediction Model," IEEE Access, vol. 7, pp. 39690-39701, 2019. DOI: https://doi.org/10.1109/ACCESS.2019.2903934
https://doi.org/10.1109/ACCESS.2019.2903934 DOI: https://doi.org/10.1109/ACCESS.2019.2903934
S. Morales, J. Magallanes, C. Delgado, and R. Canahuire, "LQR Trajectory Tracking Control of an Omnidirectional Wheeled Mobile Robot," Dec. 2018. https://doi.org/10.1109/CCRA.2018.8588146 DOI: https://doi.org/10.1109/CCRA.2018.8588146
T. Tongloy, S. Chuwongin, K. Jaksukam, C. Chousangsuntorn, and S. Boonsang, "Asynchronous deep reinforcement learning for the mobile robot navigation with supervised auxiliary tasks," in 2017 2nd International Conference on Robotics and Automation Engineering, ICRAE 2017, Feb. 2018, vol. 2017-Decem, pp. 68-72. DOI: https://doi.org/10.1109/ICRAE.2017.8291355
https://doi.org/10.1109/ICRAE.2017.8291355 DOI: https://doi.org/10.1109/ICRAE.2017.8291355
A. L. Saleh, M. A. Hussain, and S. M. Klim, "Optimal Trajectory Tracking Control for a Wheeled Mobile Robot Using Fractional Order PID Controller," J. Univ. Babylon Eng. Sci., vol. 26, no. 4, pp. 292-306, Feb. 2018. https://doi.org/10.29196/jubes.v26i4.1087 DOI: https://doi.org/10.29196/jubes.v26i4.1087
D. Kiryanov and R. Lavrenov, "Remote Control Application for 'Servosila Engineer' on Android Mobile Devices," Proc. Int. Conf. Artif. Life Robot., vol. 25, no. February, pp. 440-443, 2020. DOI: https://doi.org/10.5954/ICAROB.2020.OS18-4
https://doi.org/10.5954/ICAROB.2020.OS18-4 DOI: https://doi.org/10.5954/ICAROB.2020.OS18-4
M. Wu, S. L. Dai, and C. Yang, "Mixed reality enhanced user interactive path planning for omnidirectional mobile robot," Appl. Sci., vol. 10, no. 3, p. 1135, Feb. 2020. https://doi.org/10.3390/app10031135 DOI: https://doi.org/10.3390/app10031135
A. Zea and U. D. Hanebeck, "IVIZ: a ROS visualization app for mobile devices," arXiv, 2020. DOI: https://doi.org/10.1016/j.simpa.2021.100057
https://doi.org/10.1016/j.simpa.2021.100057 DOI: https://doi.org/10.1016/j.simpa.2021.100057
K. Ruan, Z. Wu, and Q. Xu, "Smart cleaner: A new autonomous indoor disinfection robot for combating the covid-19 pandemic," Robotics, vol. 10, no. 3, 2021. https://doi.org/10.3390/robotics10030087 DOI: https://doi.org/10.3390/robotics10030087
D. Hu, H. Zhong, S. Li, J. Tan, and Q. He, "Segmenting areas of potential contamination for adaptive robotic disinfection in built environments," Build. Environ., vol. 184, 2020. https://doi.org/10.1016/j.buildenv.2020.107226 DOI: https://doi.org/10.1016/j.buildenv.2020.107226
Publicado
Cómo citar
Número
Sección
Categorías
Licencia
Derechos de autor 2021 Carlos Guillermo Miguélez Machado, Ángel Israel Soto Marrufo, Israel Ulises Ponce Monarrez, Francesco García Luna

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores/as que publiquen en esta revista aceptan las siguientes condiciones:
- Los autores/as conservan los derechos de autor y ceden a la revista el derecho de la primera publicación, con el trabajo registrado con la licencia de atribución de Creative Commons 4.0, que permite a terceros utilizar lo publicado siempre que mencionen la autoría del trabajo y a la primera publicación en esta revista.
- Los autores/as pueden realizar otros acuerdos contractuales independientes y adicionales para la distribución no exclusiva de la versión del artículo publicado en esta revista (p. ej., incluirlo en un repositorio institucional o publicarlo en un libro) siempre que indiquen claramente que el trabajo se publicó por primera vez en esta revista.
- Se permite y recomienda a los autores/as a compartir su trabajo en línea (por ejemplo: en repositorios institucionales o páginas web personales) antes y durante el proceso de envío del manuscrito, ya que puede conducir a intercambios productivos, a una mayor y más rápida citación del trabajo publicado (vea The Effect of Open Access).