Simulation of a robotic knee orthosis virtual prototype
DOI:
https://doi.org/10.37636/recit.v7n4e374Keywords:
Knee orthosis, MSC Adams, Orthosis control, Orthosis exoskeletonAbstract
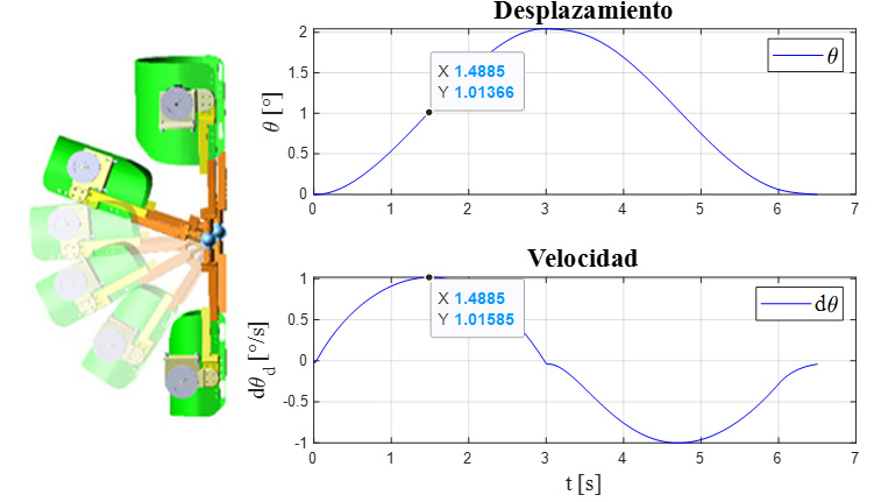
The complexity in the movements of the daily activity that people perform, causes them to recurrently suffer from some type of injury in the extremities (upper/lower); being the most common damage in the knee joint, partially or totally affecting mobility. Recent studies indicate that the use of biomechanical orthopedic devices, such as orthoses, facilitates rehabilitation and accelerates recovery from such injuries. The main objective of the design of knee orthoses is to improve mobility, stability and stiffness of the affected limb. This paper presents the process for the simulation of the flexion and extension movements of a virtual prototype of a knee orthosis, obtaining as a result the simulation and co-simulation between MSC Adams® and Simulink-Matlab®. To show the simulation process, a PID type control is implemented to follow the trajectories of the virtual prototype of the knee orthosis, using a Bézier polynomial. The results show a good performance in the trajectory tracking, obtaining a desired trajectory of a maximum bending of 2π/3 rad, with an approximate error of 0.0124 radians with respect to the desired trajectory.
Downloads
References
A. Zissimopoulos, S. Fatone, and S. A. Gard, “Biomechanical and energetic effects of a stance-control orthotic knee joint,” The Journal of Rehabilitation Research and Development, vol. 44, no. 4, p. 503, 2007, doi: 10.1682/JRRD.2006.09.0124. DOI: https://doi.org/10.1682/JRRD.2006.09.0124
P. M. Vergara, R. M. Díaz, E. F. Rivas, and M. M. Restrepo, Diseño de dispositivos para rehabilitación y ortesis., 1st ed. Venezuela, 2017, URL: https://www.researchgate.net/publication/323971491_Diseno_de_dispositivos_para_rehabilitacion_y_ortesis
N. F. Vargas, “Indicaciones de las ortesis en atención primaria,” FMC, vol. 24, no. 8, pp. 465–478, Oct. 2017, doi: 10.1016/j.fmc.2017.02.010. DOI: https://doi.org/10.1016/j.fmc.2017.02.010
M. B. Popovic, “Powered Orthotics: Enabling Brace Technologies for Upper and Lower Limbs,” in Biomechatronics, Elsevier, 2019, pp. 279–303. doi: 10.1016/B978-0-12-812939-5.00010-0. DOI: https://doi.org/10.1016/B978-0-12-812939-5.00010-0
P. A. Villa, R. D. Delisle, J. Souza Lima, A. Frizera-Neto, and T. Bastos, “Knee Impedance Modulation to Control an Active Orthosis Using Insole Sensors,” Sensors, vol. 17, no. 12, p. 2751, Nov. 2017, doi: 10.3390/s17122751. DOI: https://doi.org/10.3390/s17122751
S. Hui, Chong Jiang, Yuliang Mao, and X. Wang, “Design and control of a wearable active knee orthosis for walking assistance,” in 2016 IEEE 14th International Workshop on Advanced Motion Control (AMC), IEEE, Apr. 2016, pp. 51–56. doi: 10.1109/AMC.2016.7496327. DOI: https://doi.org/10.1109/AMC.2016.7496327
P. Felix, J. Figueiredo, C. P. Santos, and J. C. Moreno, “Powered knee orthosis for human gait rehabilitation: First advances,” in 2017 IEEE 5th Portuguese Meeting on Bioengineering (ENBENG), IEEE, 2017, pp. 1–4. doi: 10.1109/ENBENG.2017.7889427. DOI: https://doi.org/10.1109/ENBENG.2017.7889427
E. Garcia, D. Sanz-Merodio, M. Cestari, M. Perez, and J. Sancho, “An Active Knee Orthosis for the Physical Therapy of Neurological Disorders,” 2016, pp. 327–337. doi: 10.1007/978-3-319-27149-1_26. DOI: https://doi.org/10.1007/978-3-319-27149-1_26
M. J. S. Lora, A. F. Hidalgo Romero, and E. Rocon de Lima, “Diseño de una órtesis activa de rodilla para la evaluación de algoritmos de asistencia robótica en sujetos hemiparéticos,” in Actas de las XXXIX Jornadas de Automática, Badajoz, 5-7 de septiembre de 2018, Universidade da Coruña. Servizo de Publicacións, Mar. 2020, pp. 57–63. doi: 10.17979/spudc.9788497497565.0057. DOI: https://doi.org/10.17979/spudc.9788497497565.0057
N. Karavas, A. Ajoudani, N. Tsagarakis, and D. Caldwell, “Human-inspired balancing assistance: Application to a knee exoskeleton,” in 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), IEEE, Dec. 2013, pp. 292–297. doi: 10.1109/ROBIO.2013.6739474. DOI: https://doi.org/10.1109/ROBIO.2013.6739474
F. Tian, M. S. Hefzy, and M. Elahinia, “State of the Art Review of Knee–Ankle–Foot Orthoses,” Ann Biomed Eng, vol. 43, no. 2, pp. 427–441, Feb. 2015, doi: 10.1007/s10439-014-1217-z. DOI: https://doi.org/10.1007/s10439-014-1217-z
S. A. Barrera et al., “State of the Art Review of Active and Passive Knee Orthoses,” Machines, vol. 10, no. 10, p. 865, Sep. 2022, doi: 10.3390/machines10100865. DOI: https://doi.org/10.3390/machines10100865
C. Zhao, Z. Liu, L. Zhu, and Y. Wang, “Design and Research of Series Actuator Structure and Control System Based on Lower Limb Exoskeleton Rehabilitation Robot,” Actuators, vol. 13, no. 1, p. 20, Jan. 2024, doi: 10.3390/act13010020. DOI: https://doi.org/10.3390/act13010020
R. MI and A. Osman NA, “Mechanically Actuated Stance-Control-Orthoses: Advantages, Design Evaluation and Future Directions,” J Pain Relief, vol. 04, no. 06, 2015, doi: 10.4172/2167-0846.1000211. DOI: https://doi.org/10.4172/2167-0846.1000211
A. K. Das, S. Sahoo, and D. K. Pratihar, “An Improved Design of Knee Orthosis Using Self-Adaptive Bonobo Optimizer (SaBO),” J Intell Robot Syst, vol. 107, no. 1, p. 8, Jan. 2023, doi: 10.1007/s10846-022-01802-1. DOI: https://doi.org/10.1007/s10846-022-01802-1
J.-H. Kim, S.-G. Ji, K.-J. Jung, and J.-H. Kim, “Therapeutic Experience on Stance Control Knee-Ankle-Foot Orthosis With Electromagnetically Controlled Knee Joint System in Poliomyelitis,” Ann Rehabil Med, vol. 40, no. 2, p. 356, 2016, doi: 10.5535/arm.2016.40.2.356. DOI: https://doi.org/10.5535/arm.2016.40.2.356
Y. Heo, H.-J. Choi, J.-W. Lee, H.-S. Cho, and G.-S. Kim, “Motion-Based Control Strategy of Knee Actuated Exoskeletal Gait Orthosis for Hemiplegic Patients: A Feasibility Study,” Applied Sciences, vol. 14, no. 1, p. 301, Dec. 2023, doi: 10.3390/app14010301. DOI: https://doi.org/10.3390/app14010301
M. D. S. Manchola, L. J. A. Mayag, M. Munera, and C. A. C. Garcia, “Impedance-based Backdrivability Recovery of a Lower-limb Exoskeleton for Knee Rehabilitation,” in 2019 IEEE 4th Colombian Conference on Automatic Control (CCAC), IEEE, Oct. 2019, pp. 1–6. doi: 10.1109/CCAC.2019.8921278. DOI: https://doi.org/10.1109/CCAC.2019.8921278
V. C. H. Guzmán, E. J. L. Carrera, O. A. Blanco, S. M. A. Oliver, and B. F. A. Gómez, “Diseño y control de un sistema interactivo para la rehabilitación de tobillo: TobiBot,” INGENIERÍA MECÁNICA TECNOLOGÍA Y DESARROLLO, vol. 5, pp. 255–264, 2014, URL: https://www.scielo.org.mx/scielo.php?script=sci_arttext&pid=S1665-73812014000200003,
M. Alam, I. A. Choudhury, and A. Bin Mamat, “Mechanism and Design Analysis of Articulated Ankle Foot Orthoses for Drop-Foot,” The Scientific World Journal, vol. 2014, pp. 1–14, 2014, doi: 10.1155/2014/867869. DOI: https://doi.org/10.1155/2014/867869
J. F. Veneman, R. Ekkelenkamp, R. Kruidhof, F. C. T. van der Helm, and H. van der Kooij, “A Series Elastic- and Bowden-Cable-Based Actuation System for Use as Torque Actuator in Exoskeleton-Type Robots,” Int J Rob Res, vol. 25, no. 3, pp. 261–281, Mar. 2006, doi: 10.1177/0278364906063829. DOI: https://doi.org/10.1177/0278364906063829
J. F. Veneman, R. Kruidhof, E. E. G. Hekman, R. Ekkelenkamp, E. H. F. Van Asseldonk, and H. van der Kooij, “Design and Evaluation of the LOPES Exoskeleton Robot for Interactive Gait Rehabilitation,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 15, no. 3, pp. 379–386, Sep. 2007, doi: 10.1109/TNSRE.2007.903919. DOI: https://doi.org/10.1109/TNSRE.2007.903919
M. S. Cherry, D. J. Choi, K. J. Deng, S. Kota, and D. P. Ferris, “Design and Fabrication of an Elastic Knee Orthosis: Preliminary Results,” in Volume 2: 30th Annual Mechanisms and Robotics Conference, Parts A and B, ASMEDC, Jan. 2006, pp. 565–573. doi: 10.1115/DETC2006-99622. DOI: https://doi.org/10.1115/DETC2006-99622
J. Z. Chen and W. H. Liao, “Design, testing and control of a magnetorheological actuator for assistive knee braces,” Smart Mater Struct, vol. 19, no. 3, p. 035029, Mar. 2010, doi: 10.1088/0964-1726/19/3/035029. DOI: https://doi.org/10.1088/0964-1726/19/3/035029
M. J. Claros, R. Soto, J. L. Gordillo, J. L. Pons, and J. L. Contreras-Vidal, “Robotic Assistance of Human Motion Using Active-Backdrivability on a Geared Electromagnetic Motor,” Int J Adv Robot Syst, vol. 13, no. 2, p. 40, Mar. 2016, doi: 10.5772/62331. DOI: https://doi.org/10.5772/62331
B. Penzlin, M. E. Fincan, Y. Li, L. Ji, S. Leonhardt, and C. Ngo, “Design and Analysis of a Clutched Parallel Elastic Actuator,” Actuators, vol. 8, no. 3, p. 67, Sep. 2019, doi: 10.3390/act8030067. DOI: https://doi.org/10.3390/act8030067
J. Figueiredo, C. P. Santos, and J. C. Moreno, “Assistance and rehabilitation of gait disorders using active lower limb orthoses,” in 2015 IEEE 4th Portuguese Meeting on Bioengineering (ENBENG), IEEE, Feb. 2015, pp. 1–6. doi: 10.1109/ENBENG.2015.7088837. DOI: https://doi.org/10.1109/ENBENG.2015.7088837
I. A. Amaia, “Análisis dinámico de las fuerzas de contacto órtesis pierna mediante un modelo biomecánico tridimensional,” Tesis de Máster, Universitat Politécnica de Catalunya, Barcelona, 2014, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://biomec.upc.edu/wp-content/uploads/theses/Ilzarbe-MSc-Thesis-Analisis%20dinamico%20de%20las%20fuerzas%20de%20contacto%20ortesis-pierna%20mediante%20un%20modelo%20biomecanico%20tridimensional.pdf
S. A. Fesharaki et al., “The Effects of Knee Orthosis with Two Degrees of Freedom Joint Design on Gait and Sit-to-Stand Task in Patients with Medial Knee Osteoarthritis,” Sultan Qaboos University Medical Journal [SQUMJ], vol. 20, no. 4, pp. e324-331, Dec. 2020, doi: 10.18295/squmj.2020.20.04.008. DOI: https://doi.org/10.18295/squmj.2020.20.04.008
E. Lugo, P. Ponce, A. Molina, and S. Castro, “Co-simulación del Diseño Biomecánico para un Exoesqueleto Robótico del Miembro Inferior,” Revista Mexicana de Ingeniería Biomédica, vol. 2, pp. 143–156, Aug. 2014, URL: https://www.researchgate.net/publication/273327998_Co-simulacion_del_Diseno_Biomecanico_para_un_Exoesqueleto_Robotico_del_Miembro_Inferior
M. V. Urdaniz, M. A. Ortiz, A. A. Bonardi, and G. G. Gentiletti, “Diseño y Simulación de una Órtesis Robótica para Rehabilitación de la Marcha,” 2009, URL: https://www.researchgate.net/publication/242363654_Diseno_y_Simulacion_de_una_Ortesis_Robotica_para_Rehabilitacion_de_la_Marcha
L. Ángel, M. P. Pérez, Q. C. Díaz, and C. Mendoza, “ADAMS/MATLAB Co-Simulation: Dynamic Systems Analysis and Control Tool,” Applied Mechanics and Materials, vol. 232, pp. 527–531, Nov. 2012, doi: 10.4028/www.scientific.net/AMM.232.527. DOI: https://doi.org/10.4028/www.scientific.net/AMM.232.527
R. J. Pulles, “Controller design for ADAMS models using Matlab/SIMULINK interaction,” Technische Universiteit Eindhoven., 2003, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://pure.tue.nl/ws/files/4339937/614916.pdf
O. C. Chávez, E. Rubio, and C. Guzmán, “Study of dynamic simulators with ADAMS and Matlab/Simulink for control systems,” Revista Internacional de Métodos Numéricos para Cálculo y Diseño en Ingeniería, vol. 38, no. 1, 2022, doi: 10.23967/j.rimni.2022.04.001. DOI: https://doi.org/10.23967/j.rimni.2022.04.001
A. S. Nair and D. Ezhilarasi, “Performance Analysis of Super Twisting Sliding Mode Controller by ADAMS–MATLAB Co-simulation in Lower Extremity Exoskeleton,” International Journal of Precision Engineering and Manufacturing-Green Technology, vol. 7, no. 3, pp. 743–754, May 2020, doi: 10.1007/s40684-020-00202-w. DOI: https://doi.org/10.1007/s40684-020-00202-w
R. López, H. Aguilar, S. Salazar, R. Lozano, and J. A. Torres, “Modelado y Control de un Exoesqueleto para la Rehabilitación de Extremidad Inferior con dos grados de libertad,” Revista Iberoamericana de Automática e Informática Industrial RIAI, vol. 11, no. 3, pp. 304–314, Jul. 2014, doi: 10.1016/j.riai.2014.02.008. DOI: https://doi.org/10.1016/j.riai.2014.02.008
Craig J., Introduction to Robotics (Mechanics and Control), 2nd edition. 1989, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://marsuniversity.github.io/ece387/Introduction-to-Robotics-Craig.pdf
Selig J., Introductory Robotics . 1992, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/http://www.robot.bmstu.ru/files/books/Robotic%20-%20Introductory%20Robotics%20-%20Prentice%20Hall%201992.pdf
S. M. A. Romero, “Diseño y Construcción de una Órtesis de Rodilla, Destinada a la Rehabilitación Automatizada de la Extremidad Inferior.” Universidad Politécnica Salesiana, Cuenca, 2012, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://dspace.ups.edu.ec/bitstream/123456789/2814/1/UPS-CT002463.pdf
P. Y. Torres, “Evaluación cuantitativa de una prótesis de miembro inferior unilateral,” Tesis, Universidad Distrital Francisco José de Caldas, Bogotá, Colombia., 2005, URL: chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://repositorio.uniandes.edu.co/server/api/core/bitstreams/abc58095-385f-4305-bcc4-1d01f66a4362/content
J. D. Boyling, “A Review of: ‘The Biomechanics and Motor Control of Human Gait’ By DAVID A. WINTER. (University of Waterloo Press, Waterloo, Canada, 1987.) [Pp. 72.],” Ergonomics, vol. 32, no. 4, pp. 453–453, Apr. 1989, doi: 10.1080/00140138908966114. DOI: https://doi.org/10.1080/00140138908966114
D. Knundson, Fundamentals of Biomechanics. Boston, MA: Springer US, 2007. doi: 10.1007/978-0-387-49312-1. DOI: https://doi.org/10.1007/978-0-387-49312-1
F. Ferryanto, I. Herman, S. Mihradi, T. Dirgantara, and A. I. Mahyuddin, “Development of a 3D Gait Measurement Protocol for Amputees Walking on Treadmill,” MESIN, vol. 26, no. 1, pp. 29–39, Apr. 2017, doi: 10.5614/MESIN.2017.26.1.4. DOI: https://doi.org/10.5614/MESIN.2017.26.1.4
M. Khosravi, M. Jalali, T. Babaee, M. Ali Sanjari, and A. Rahimi, “Evaluating the effective pressure applied by a valgus knee orthosis in individuals with medial knee osteoarthritis based on the dose–response relationship,” Knee, vol. 40, pp. 174–182, Jan. 2023, doi: 10.1016/j.knee.2022.11.002. DOI: https://doi.org/10.1016/j.knee.2022.11.002
R. Dwarakanathan, R. K. Mohanty, S. Sahoo, and S. Prasad, “Efficacy of unloader knee orthosis and lateral wedge insole on static balance in medial knee osteoarthritis,” Journal of Orthopaedics, Trauma and Rehabilitation, vol. 29, no. 1, p. 221049172210952, Jun. 2022, doi: 10.1177/22104917221095256. DOI: https://doi.org/10.1177/22104917221095256
O. A. Blanco, B. F. A. Gomez, L. G. V. Valdes, and R. O. D. Arcega, “A Generalized Proportional Integral Controller for an Ankle Rehabilitation Machine Based on an XY Table,” in 2013 International Conference on Mechatronics, Electronics and Automotive Engineering, IEEE, Nov. 2013, pp. 152–157. doi: 10.1109/ICMEAE.2013.24. DOI: https://doi.org/10.1109/ICMEAE.2013.24
O. A. Blanco, B. R. F. Vázquez, V. G. Vela, M. E. Quintero, and L. G. López, “Control of a virtual prototype of an ankle rehabilitation machine,” Revista Facultad de Ingeniería Universidad de Antioquia, no. 67, pp. 183–196, Aug. 2013, doi: 10.17533/udea.redin.16321. DOI: https://doi.org/10.17533/udea.redin.16321
Downloads
Published
Issue
Section
Categories
License
Copyright (c) 2024 Agustín Barrera Sánchez, Héctor Ramón Azcaray Rivera, Andrés Blanco Ortega, Rafael Campos Amezcua, Arturo Abúndez Pliego, Jhonatan Isidro Godoy

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors who publish in this journal accept the following conditions:
The authors retain the copyright and assign to the journal the right of the first publication, with the work registered with the Creative Commons Attribution license 4.0, which allows third parties to use what is published as long as they mention the authorship of the work and the first publication in this magazine.
Authors may make other independent and additional contractual agreements for the non-exclusive distribution of the version of the article published in this journal (eg, include it in an institutional repository or publish it in a book) as long as they clearly indicate that the work it was first published in this magazine.
Authors are allowed and encouraged to share their work online (for example: in institutional repositories or personal web pages) before and during the manuscript submission process, as it can lead to productive exchanges, greater and more quick citation of published work (see The Effect of Open Access).
How to Cite