Optimal control design for furuta's pendulum
DOI:
https://doi.org/10.37636/recit.v124953Keywords:
Optimal Control, Furuta Pendulum, Subactuated Systems, Electronic and Instrumentation.Abstract
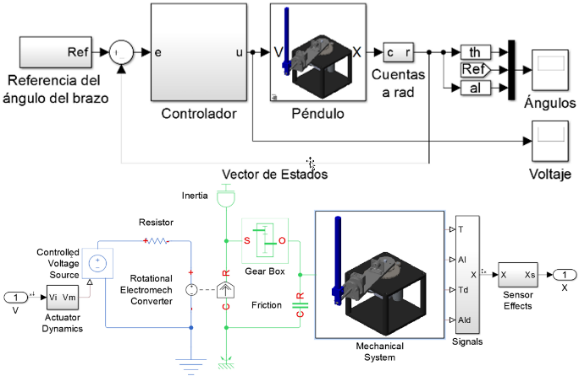
In this article, we discuss the design of a controller for the Furuta pendulum, which is a subactuated, nonlinear and highly unstable system, which makes it a scientific and technological challenge. This system is often used in the domain of control theory as it helps to understand concepts of control mechanisms. The dynamics of the Furuta pendulum can be found in several high-profile physical systems, such as: two-wheel robots, Segway, personal transporters, rocket propellers, flight controls, etc. The objective is to solve the stabilization problem in the unstable inverted position of the pendulum using an optimal controller, making use of the dynamic model of a pendulum manufactured by Quanser©. A linear quadratic regulator was designed, such that the undisturbed system is stable around the unstable inverted position, while the input signal energy is appropriate. The existence of the solutions of Riccati's algebraic equation assures stabilization and detectability of the system and implies that the closed-loop system is stable. The results show that the controller satisfies the design requirements of the system.Downloads
References
Yan Q.,"Output Tracking of Underactuated Rotary Inverted Pendulum by Nonlinear Controller", Proceedings of the 42nd IEEE Conference on Decision and Control, Vol. 3, pp. 2395−2400, 2003. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.451.4866&rep=rep1&type=pdf
Reyhanoglu M., Mcclamroch y Kolmanovsky I., "Dynamics and Control of a Class of Underactuated Mechanical Systems", IEEE Trans. on A. C., Vol. 44, pp. 1663−1671, 1999. https://doi.org/10.1109/9.788533 DOI: https://doi.org/10.1109/9.788533
Boubaker O., "The Inverted Pendulum: A Fundamental Benchmark in Control Theory and Robotics", IEEE International Conference on Education and e-Learning Innovations, pp. 1−6, 2012. https://doi.org/10.1109/ICEELI.2012.6360606 DOI: https://doi.org/10.1109/ICEELI.2012.6360606
Tejado I. and Torres D., "Physical Modeling Based Simulators to Support Teaching in Automatic Control: the Rotatory Pendulum", IFAC-PapersOnLine, Vol. 49(6), pp.75−80, 2016. https://doi.org/10.1016/j.ifacol.2016.07.156 DOI: https://doi.org/10.1016/j.ifacol.2016.07.156
Pierre, R., "Control Engineering a Modern Approach", Sanders College Publishing, 1995. http://downloads.hindawi.com/journals/specialissues/508979.pdf
Downloads
Published
Issue
Section
Categories
License
Copyright (c) 2018 Jován Oseas Mérida Rubio, Paul Alejandro Chávez Vázquez, Luis Nestor Coria de los Ríos, Carlos Alberto Chávez Guzmán

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors who publish in this journal accept the following conditions:
The authors retain the copyright and assign to the journal the right of the first publication, with the work registered with the Creative Commons Attribution license 4.0, which allows third parties to use what is published as long as they mention the authorship of the work and the first publication in this magazine.
Authors may make other independent and additional contractual agreements for the non-exclusive distribution of the version of the article published in this journal (eg, include it in an institutional repository or publish it in a book) as long as they clearly indicate that the work it was first published in this magazine.
Authors are allowed and encouraged to share their work online (for example: in institutional repositories or personal web pages) before and during the manuscript submission process, as it can lead to productive exchanges, greater and more quick citation of published work (see The Effect of Open Access).
How to Cite