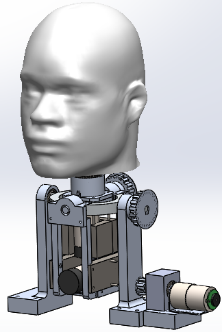
Development of a mechatronic system for humanoid robot that allows to emulate the movement of the neck of human beings
DOI:
https://doi.org/10.37636/recit.v213539Keywords:
Keywords, Mechatronic System, Humanoid Robot, Dynamic Model, FPGA, WiFi.Abstract
The present work shows the design of a mechatronic system, which emulates the movements of the human neck, as it will support the head of a humanoid robot (Arthur) developed by Hanson Robotics. The mechanical design is based on a spherical robot of 3 degrees of freedom (3-GDL), the dynamic model is developed through the Euler-Lagrange equations of motion. The control stage is a FPGA (Field Programmable Gate Arrays) development board, the power stage is based on BJT transistors, the hyperbolic tangent controller and a WiFi communication interface are implemented to configure the robot From a PC with the help of Labview software. As a result, the integration of the mechatronic system, the interface developed together with the FPGA-PC communication and position control, is shown. Future work will be the implementation of the system in the humanoid robot.Downloads
References
Hanson Robotics. (2016, 15 Marzo). Meet Arthur a Humanoid Robot (Hanson Robotic News). [Página web]. Disponible en: http://hansonrobotics.com/slate-fr-blogger-meets-arthur-dld-conference/
J. L. Guerra, Manual de fisioterapia (2a. ed.). Editorial El Manual Moderno, 2018. https://tienda.manualmoderno.com/manual-de-fisioterapia-9786074487107-9786074487190.html?SID=38b00ea117d111154a7fd6fe32c80c75&___store%5B_data%5D%5Bstore_id%5D=2&___store%5B_data%5D%5Bcode%5D=manual_moderno_mexico_mxn&___store%5B_data%5D%5Bwebsite_id%5D=2&___store%5B_data%5D%5Bgroup_id%5D=2&___store%5B_data%5D%5Bname%5D=Manual+Moderno+M%C3%A9xico&___store%5B_data%5D%5Bsort_order%5D=0&___store%5B_data%5D%5Bis_active%5D=1
F. Cortés, “Robótica: Control de Robots Manipuladores”, Alfaomega Grupo Editor, 1era. Edición, México, 2011. https://www.alfaomega.com.mx/default/robotica-control-de-robots-manipuladores-4645.html
Published
How to Cite
Issue
Section
Categories
License
Copyright (c) 2019 Francisco José López Cortés, Sergio Vergara Limón, María Aurora Diozcora Vargas Treviño, Amparo Dora Palomino Merina, David Eduardo Pinto Avedaño, Darnes Vilariño Ayala

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors who publish in this journal accept the following conditions:
The authors retain the copyright and assign to the journal the right of the first publication, with the work registered with the Creative Commons Attribution license 4.0, which allows third parties to use what is published as long as they mention the authorship of the work and the first publication in this magazine.
Authors may make other independent and additional contractual agreements for the non-exclusive distribution of the version of the article published in this journal (eg, include it in an institutional repository or publish it in a book) as long as they clearly indicate that the work it was first published in this magazine.
Authors are allowed and encouraged to share their work online (for example: in institutional repositories or personal web pages) before and during the manuscript submission process, as it can lead to productive exchanges, greater and more quick citation of published work (see The Effect of Open Access).