Card to control 3 degrees of freedom of robots via wifi
DOI:
https://doi.org/10.37636/recit.v227179Keywords:
FPGA, WIFI Communication Protocol, Hyperbolic Tangent Control.Abstract
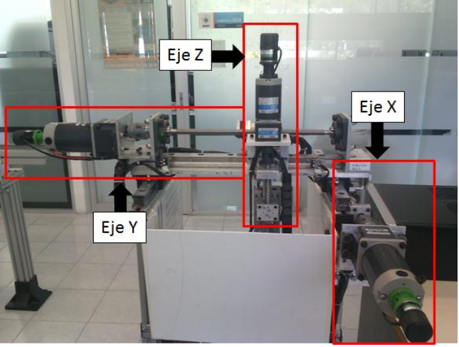
The present work describes the development of a control system for a three D.O.F Cartesian robot using an embedded system where the information transfer is done by the WIFI communication protocol. A description of the mechanical design of the robot is given, as well as the kinematic and dynamic model. It details the design of an acquisition system, developed in FPGA based embedded system of the Altera Cyclone III family, and also the interpretation of the robot signal handling and WIFI communication. In addition, it shows the development of the firmware responsible of the control and communication. Regarding the control, a hyperbolic tangent controller is selected for preliminary results and with these, the Cartesian robot can be analyzed and regulated.
Downloads
References
D. Bernstein and L. Bushnell, "The History of Control: From Idea to Technology", IEEE Control Systems Magazine, vol. 22(2), pp. 21-23, April 2002. https://doi.org/10.1109/MCS.2002.993310 DOI: https://doi.org/10.1109/MCS.2002.993310
J. Carballar, Wi-Fi Instalación, Seguridad y Aplicaciones, (Vol. 1). México, México, México: Alfaomega, 2007. https://biblioteca.epn.edu.ec/cgi-bin/koha/opac-detail.pl?biblionumber=23215&shelfbrowse_itemnumber=30782
R. Kelly y V. Santivañez, Control de Movimiento de Robots Manipuladores, Prentice Hall, 2003. http://amca.mx/memorias/amca2009/articulos/amca2009_42.pdf
D. Rojas-Balbuena, "Diseño, construcción e instrumentación de un robot cartesiano pick and place de 4 GDL", Tesis de maestría FCE, BUAP, Puebla, Puebla, junio del 2011. https://repositorioinstitucional.buap.mx/bitstream/handle/20.500.12371/2563/757816T.pdf?sequence=1
F. Reyes-Cortes, Robótica control de robots manipuladores, Ed. alfa omega, 1er edición. https://www.alfaomega.com.mx/default/catalogo/profesional/robotica-control-de-robots-manipuladores.html
J. Balcells y J.L Romera, Autómatas Programables, Ed. Marcombo, 1997. https://books.google.com.mx/books?id=xfsSjADge70C&sitesec=reviews
J. Vargas-Valencia, I. Ramírez-Velázquez, y S. Pérez-Walton, Física mecánica conceptos básicos y problemas, Ed. ITM, 1a edición diciembre del 2008. https://fondoeditorial.itm.edu.co/libros-impresos/fisica-mecanica/detalle-libro.html
A. Barrientos, L.F. Peñin, C. Balaguer y R. Aracil. Fundamentos de robótica, Ed. Mc Graw Hill, 1997. https://eltrasteroloco.files.wordpress.com/2017/03/267380685-fundamentos-de-robotica.pdf
A. Ollero Baturone. Robótica Manipuladores y robots móviles, Ed Alfaomega, julio de 2008. http://el.uy/doc/robotica/Ollero%20Baturone,%20An%C3%ADbal.%202001.%20Rob%C3%B3tica,%20manipuladores%20y%20robots%20m%C3%B3viles.pdf
S. Kumar Saha. Introducción a la Robótica, Ed. Mc Graw Hill, 2008. http://biblio.upmx.mx/library/index.php?title=301750&lang=en&query=@title=Special:GSMSearchPage@process=@autor=SAHA,%20SUBIR%20KUMAR%20@mode=&recnum=1&mode=
Robot cartesiano de 3 g.d.l. Lexium, disponible en: http://www.alumotion.eu/portfolio_item/urcaps-uring/ 2015.
Guía aplicada del robot cartesiano, Schneider electric, 11 de diciembre del 2008, versión1.3.
Downloads
Published
Issue
Section
Categories
License
Copyright (c) 2019 José de Jesús Moya Mora, Sergio Vergara Limón, José Fernando Reyes Cortes

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors who publish in this journal accept the following conditions:
The authors retain the copyright and assign to the journal the right of the first publication, with the work registered with the Creative Commons Attribution license 4.0, which allows third parties to use what is published as long as they mention the authorship of the work and the first publication in this magazine.
Authors may make other independent and additional contractual agreements for the non-exclusive distribution of the version of the article published in this journal (eg, include it in an institutional repository or publish it in a book) as long as they clearly indicate that the work it was first published in this magazine.
Authors are allowed and encouraged to share their work online (for example: in institutional repositories or personal web pages) before and during the manuscript submission process, as it can lead to productive exchanges, greater and more quick citation of published work (see The Effect of Open Access).
How to Cite