Tarjeta para controlar 3 grados de libertad de robots vía wifi
DOI:
https://doi.org/10.37636/recit.v227179Palabras clave:
FPGA, Protocolo de Comunicación WIFI, Control Tangente Hiperbólico.Resumen
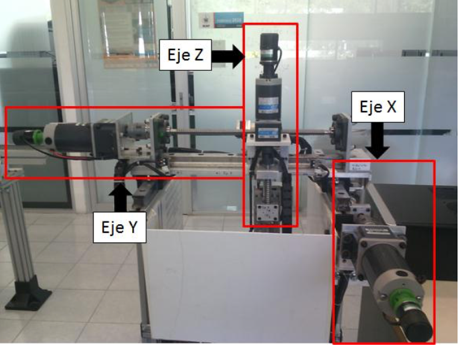
El presente trabajo describe el desarrollo de un sistema para controlar un robot de tres grados de libertad utilizando un sistema embebido, la transferencia de información se realiza mediante el protocolo de comunicación WIFI. El robot que se utiliza es el tipo cartesiano. Se hace una descripción del diseño mecánico del robot, así como la obtención del modelo cinemático y dinámico. Se detalla el diseño de un sistema de adquisición, desarrollando un sistema embebido basado en FPGA de la marca altera de la familia Cyclone III el cual cuenta con un controlador interno, así como la interpretación del manejo de las señales del robot y comunicación WIFI, se explica el desarrollo del firmware que realiza el control y como se establece la comunicación. El controlador seleccionado es el de tangente hiperbólica. Dicho controlador es implementado en el firmware con el fin de controlar y analizar el comportamiento del sistema.Descargas
Referencias
D. Bernstein and L. Bushnell, "The History of Control: From Idea to Technology", IEEE Control Systems Magazine, vol. 22(2), pp. 21-23, April 2002. https://doi.org/10.1109/MCS.2002.993310 DOI: https://doi.org/10.1109/MCS.2002.993310
J. Carballar, Wi-Fi Instalación, Seguridad y Aplicaciones, (Vol. 1). México, México, México: Alfaomega, 2007. https://biblioteca.epn.edu.ec/cgi-bin/koha/opac-detail.pl?biblionumber=23215&shelfbrowse_itemnumber=30782
R. Kelly y V. Santivañez, Control de Movimiento de Robots Manipuladores, Prentice Hall, 2003. http://amca.mx/memorias/amca2009/articulos/amca2009_42.pdf
D. Rojas-Balbuena, "Diseño, construcción e instrumentación de un robot cartesiano pick and place de 4 GDL", Tesis de maestría FCE, BUAP, Puebla, Puebla, junio del 2011. https://repositorioinstitucional.buap.mx/bitstream/handle/20.500.12371/2563/757816T.pdf?sequence=1
F. Reyes-Cortes, Robótica control de robots manipuladores, Ed. alfa omega, 1er edición. https://www.alfaomega.com.mx/default/catalogo/profesional/robotica-control-de-robots-manipuladores.html
J. Balcells y J.L Romera, Autómatas Programables, Ed. Marcombo, 1997. https://books.google.com.mx/books?id=xfsSjADge70C&sitesec=reviews
J. Vargas-Valencia, I. Ramírez-Velázquez, y S. Pérez-Walton, Física mecánica conceptos básicos y problemas, Ed. ITM, 1a edición diciembre del 2008. https://fondoeditorial.itm.edu.co/libros-impresos/fisica-mecanica/detalle-libro.html
A. Barrientos, L.F. Peñin, C. Balaguer y R. Aracil. Fundamentos de robótica, Ed. Mc Graw Hill, 1997. https://eltrasteroloco.files.wordpress.com/2017/03/267380685-fundamentos-de-robotica.pdf
A. Ollero Baturone. Robótica Manipuladores y robots móviles, Ed Alfaomega, julio de 2008. http://el.uy/doc/robotica/Ollero%20Baturone,%20An%C3%ADbal.%202001.%20Rob%C3%B3tica,%20manipuladores%20y%20robots%20m%C3%B3viles.pdf
S. Kumar Saha. Introducción a la Robótica, Ed. Mc Graw Hill, 2008. http://biblio.upmx.mx/library/index.php?title=301750&lang=en&query=@title=Special:GSMSearchPage@process=@autor=SAHA,%20SUBIR%20KUMAR%20@mode=&recnum=1&mode=
Robot cartesiano de 3 g.d.l. Lexium, disponible en: http://www.alumotion.eu/portfolio_item/urcaps-uring/ 2015.
Guía aplicada del robot cartesiano, Schneider electric, 11 de diciembre del 2008, versión1.3.
Publicado
Número
Sección
Categorías
Licencia
Derechos de autor 2019 José de Jesús Moya Mora, Sergio Vergara Limón, José Fernando Reyes Cortes

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores/as que publiquen en esta revista aceptan las siguientes condiciones:
- Los autores/as conservan los derechos de autor y ceden a la revista el derecho de la primera publicación, con el trabajo registrado con la licencia de atribución de Creative Commons 4.0, que permite a terceros utilizar lo publicado siempre que mencionen la autoría del trabajo y a la primera publicación en esta revista.
- Los autores/as pueden realizar otros acuerdos contractuales independientes y adicionales para la distribución no exclusiva de la versión del artículo publicado en esta revista (p. ej., incluirlo en un repositorio institucional o publicarlo en un libro) siempre que indiquen claramente que el trabajo se publicó por primera vez en esta revista.
- Se permite y recomienda a los autores/as a compartir su trabajo en línea (por ejemplo: en repositorios institucionales o páginas web personales) antes y durante el proceso de envío del manuscrito, ya que puede conducir a intercambios productivos, a una mayor y más rápida citación del trabajo publicado (vea The Effect of Open Access).
Cómo citar