Tracking control of a wheeled mobile robot in a velocity field with obstacle avoidance
DOI:
https://doi.org/10.37636/recit.v6n4e266Keywords:
Velocity field, Obstacle avoidance, Wheeled Mobile Robot (WMR).Abstract
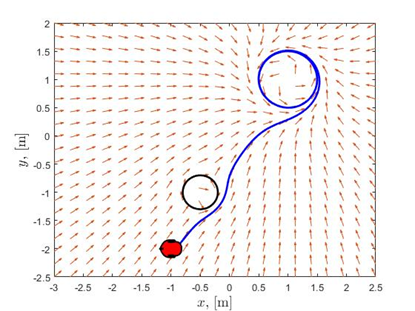
Non-holonomic vehicles, that is, vehicles with movement constraints or unable to follow any desired path, are used in a wide range of activities, both in everyday life and in industrial environments. This paper presents a navigation strategy for unicycle-type vehicles based on velocity potential fields. The validation of the navigation strategy was carried out using numerical simulation and experiments on the test platform. The results obtained demonstrate that the studied method fulfills the assigned task.
Downloads
References
B. Li, H. Du, and W. Li, "A potential field approach-based trajectory control for autonomous electric vehicles with in-wheel motors," IEEE Transactions on Intelligent Transportation Systems, vol. 18, no. 8, pp. 2044-2055, 2016. https://doi.org/10.1109/TITS.2016.2632710 DOI: https://doi.org/10.1109/TITS.2016.2632710
S. Ionita, "Autonomous vehicles: from paradigms to technology," in IOP Conference Series: Materials Science and Engineering, vol. 252, no. 1, p. 012098, October 2017. https://doi.org/10.1088/1757-899X/252/1/012098 DOI: https://doi.org/10.1088/1757-899X/252/1/012098
J. Kim and P.K. Khosla, "Real-time obstacle avoidance using harmonic potential functions," IEEE Transactions on Robotics and Automation, vol. 8, pp. 338-349, 1992. https://doi.org/10.1109/70.143352 DOI: https://doi.org/10.1109/70.143352
Gan, L., Yan, Z., Zhang, L., Liu, K., Zheng, Y., Zhou, C., and Shu, Y. "Ship path planning based on safety potential field in inland rivers," Ocean Engineering, vol 260, 111928, 2022. https://doi.org/10.1016/j.oceaneng.2022.111928 DOI: https://doi.org/10.1016/j.oceaneng.2022.111928
Z. Ye, S. Régnier, and M. Sitti, "Rotating magnetic miniature swimming robots with multiple flexible flagella," IEEE Transactions on Robotics, vol. 30, no. 1, pp. 3-13, 2013. https://doi.org/10.1109/TRO.2013.2280058 DOI: https://doi.org/10.1109/TRO.2013.2280058
Lin, P., Yang, J. H., Quan, Y. S., and Chung, C. C. "Potential field‐based path planning for emergency collision avoidance with a clothoid curve in waypoint tracking," Asian Journal of Control, vol 24, no 3, pp. 1074-1087, 2022. https://doi.org/10.1002/asjc.2778 DOI: https://doi.org/10.1002/asjc.2778
L. A. García-Delgado, J. R. Noriega, D. Berman-Mendoza, A. L. Leal-Cruz, A. Vera-Marquina, R. Gómez-Fuentes, ... I. E. Zaldívar-Huerta, "Repulsive function in potential field based control with algorithm for safer avoidance," Journal of Intelligent & Robotic Systems, vol. 80, pp. 59-70, 2015. https://doi.org/10.1007/s10846-014-0157-z DOI: https://doi.org/10.1007/s10846-014-0157-z
Wahab, S. H. A., Saudi, A., Saad, N., and Chekia, A. "UAV Path Planning using Rotated TOR in Structured Environment.2 In 2022 IEEE International Conference on Artificial Intelligence in Engineering and Technology (IICAIET) (pp. 1-6). September 2022. https://doi.org/10.1109/IICAIET55139.2022.9936757 DOI: https://doi.org/10.1109/IICAIET55139.2022.9936757
Chen, X., Huang, Z., Sun, Y., Zhong, Y., Gu, R., and Bai, L. "Online on-road motion planning based on hybrid potential field model for car-like robot," Journal of Intelligent & Robotic Systems, vol. 105, no. 1, 7, 2022. https://doi.org/10.1007/s10846-022-01620-5 DOI: https://doi.org/10.1007/s10846-022-01620-5
P. Vadakkepat, K. C. Tan, and W. Ming-Liang, "Evolutionary artificial potential fields and their application in real-time robot path planning," in Proceedings of the 2000 Congress on Evolutionary Computation, CEC00 (Cat. No. 00TH8512), vol. 1, pp. 256-263, July 2000.
Puriyanto, R. D., Wahyunggoro, O., and Cahyadi, A. I. "Implementation of improved artificial potential field path planning algorithm in differential drive mobile robot," In 14th International Conference on Information Technology and Electrical Engineering (ICITEE) (pp. 18-23), October 2022. https://doi.org/10.1109/ICITEE56407.2022.9954079 DOI: https://doi.org/10.1109/ICITEE56407.2022.9954079
C. Pérez-D'Arpino, W. Medina-Meléndez, L. Fermín, J. Guzmán, G. Fernández-López, and J.C. Grieco, "Dynamic Velocity Field Angle Generation for Obstacle Avoidance in Mobile Robots Using Hydrodynamics," in Advances in Artificial Intelligence - IBERAMIA 2008; H. Geffner, R. Prada, I. Machado Alexandre, N. David (Eds.); Springer Berlin Heidelberg: Berlin, Heidelberg, 2008; pp. 372-381. https://doi.org/10.1007/978-3-540-88309-8_38 DOI: https://doi.org/10.1007/978-3-540-88309-8_38
Downloads
Published
Issue
Section
Categories
License
Copyright (c) 2023 Luis Arturo García , Ricardo Pérez Alcocer, Gilberto Ramos

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors who publish in this journal accept the following conditions:
The authors retain the copyright and assign to the journal the right of the first publication, with the work registered with the Creative Commons Attribution license 4.0, which allows third parties to use what is published as long as they mention the authorship of the work and the first publication in this magazine.
Authors may make other independent and additional contractual agreements for the non-exclusive distribution of the version of the article published in this journal (eg, include it in an institutional repository or publish it in a book) as long as they clearly indicate that the work it was first published in this magazine.
Authors are allowed and encouraged to share their work online (for example: in institutional repositories or personal web pages) before and during the manuscript submission process, as it can lead to productive exchanges, greater and more quick citation of published work (see The Effect of Open Access).
How to Cite