Control de seguimiento de robot móvil rodante en campo de velocidad con evasión de obstáculos
DOI:
https://doi.org/10.37636/recit.v6n4e266Palabras clave:
Campos potenciales de velocidad, Evasión de obstáculos, Robot móvil rodante (WMR).Resumen
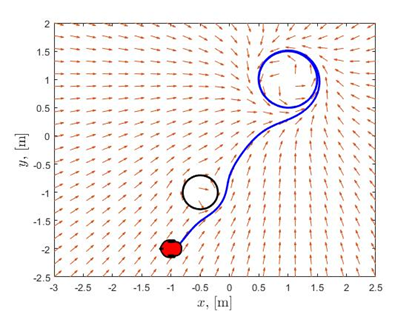
Los vehículos no holonómicos, es decir, aquellos vehículos que tienen restricciones de movimiento o no pueden seguir cualquier trayectoria deseada, son empleados en una amplia gama de actividades, tanto en la vida cotidiana como en ambientes industriales. En este trabajo se presenta una estrategia de navegación para vehículos tipo uniciclo, basada en campos potenciales de velocidad. La validación de la estrategia de navegación se realizó empleando simulación numérica y experimentos en la plataforma de prueba. Los resultados obtenidos muestran que el método estudiado cumple con la tarea asignada.
Descargas
Citas
B. Li, H. Du, and W. Li, "A potential field approach-based trajectory control for autonomous electric vehicles with in-wheel motors," IEEE Transactions on Intelligent Transportation Systems, vol. 18, no. 8, pp. 2044-2055, 2016. https://doi.org/10.1109/TITS.2016.2632710 DOI: https://doi.org/10.1109/TITS.2016.2632710
S. Ionita, "Autonomous vehicles: from paradigms to technology," in IOP Conference Series: Materials Science and Engineering, vol. 252, no. 1, p. 012098, October 2017. https://doi.org/10.1088/1757-899X/252/1/012098 DOI: https://doi.org/10.1088/1757-899X/252/1/012098
J. Kim and P.K. Khosla, "Real-time obstacle avoidance using harmonic potential functions," IEEE Transactions on Robotics and Automation, vol. 8, pp. 338-349, 1992. https://doi.org/10.1109/70.143352 DOI: https://doi.org/10.1109/70.143352
Gan, L., Yan, Z., Zhang, L., Liu, K., Zheng, Y., Zhou, C., and Shu, Y. "Ship path planning based on safety potential field in inland rivers," Ocean Engineering, vol 260, 111928, 2022. https://doi.org/10.1016/j.oceaneng.2022.111928 DOI: https://doi.org/10.1016/j.oceaneng.2022.111928
Z. Ye, S. Régnier, and M. Sitti, "Rotating magnetic miniature swimming robots with multiple flexible flagella," IEEE Transactions on Robotics, vol. 30, no. 1, pp. 3-13, 2013. https://doi.org/10.1109/TRO.2013.2280058 DOI: https://doi.org/10.1109/TRO.2013.2280058
Lin, P., Yang, J. H., Quan, Y. S., and Chung, C. C. "Potential field‐based path planning for emergency collision avoidance with a clothoid curve in waypoint tracking," Asian Journal of Control, vol 24, no 3, pp. 1074-1087, 2022. https://doi.org/10.1002/asjc.2778 DOI: https://doi.org/10.1002/asjc.2778
L. A. García-Delgado, J. R. Noriega, D. Berman-Mendoza, A. L. Leal-Cruz, A. Vera-Marquina, R. Gómez-Fuentes, ... I. E. Zaldívar-Huerta, "Repulsive function in potential field based control with algorithm for safer avoidance," Journal of Intelligent & Robotic Systems, vol. 80, pp. 59-70, 2015. https://doi.org/10.1007/s10846-014-0157-z DOI: https://doi.org/10.1007/s10846-014-0157-z
Wahab, S. H. A., Saudi, A., Saad, N., and Chekia, A. "UAV Path Planning using Rotated TOR in Structured Environment.2 In 2022 IEEE International Conference on Artificial Intelligence in Engineering and Technology (IICAIET) (pp. 1-6). September 2022. https://doi.org/10.1109/IICAIET55139.2022.9936757 DOI: https://doi.org/10.1109/IICAIET55139.2022.9936757
Chen, X., Huang, Z., Sun, Y., Zhong, Y., Gu, R., and Bai, L. "Online on-road motion planning based on hybrid potential field model for car-like robot," Journal of Intelligent & Robotic Systems, vol. 105, no. 1, 7, 2022. https://doi.org/10.1007/s10846-022-01620-5 DOI: https://doi.org/10.1007/s10846-022-01620-5
P. Vadakkepat, K. C. Tan, and W. Ming-Liang, "Evolutionary artificial potential fields and their application in real-time robot path planning," in Proceedings of the 2000 Congress on Evolutionary Computation, CEC00 (Cat. No. 00TH8512), vol. 1, pp. 256-263, July 2000.
Puriyanto, R. D., Wahyunggoro, O., and Cahyadi, A. I. "Implementation of improved artificial potential field path planning algorithm in differential drive mobile robot," In 14th International Conference on Information Technology and Electrical Engineering (ICITEE) (pp. 18-23), October 2022. https://doi.org/10.1109/ICITEE56407.2022.9954079 DOI: https://doi.org/10.1109/ICITEE56407.2022.9954079
C. Pérez-D'Arpino, W. Medina-Meléndez, L. Fermín, J. Guzmán, G. Fernández-López, and J.C. Grieco, "Dynamic Velocity Field Angle Generation for Obstacle Avoidance in Mobile Robots Using Hydrodynamics," in Advances in Artificial Intelligence - IBERAMIA 2008; H. Geffner, R. Prada, I. Machado Alexandre, N. David (Eds.); Springer Berlin Heidelberg: Berlin, Heidelberg, 2008; pp. 372-381. https://doi.org/10.1007/978-3-540-88309-8_38 DOI: https://doi.org/10.1007/978-3-540-88309-8_38
Publicado
Cómo citar
Número
Sección
Categorías
Licencia
Derechos de autor 2023 Luis Arturo García , Ricardo Pérez Alcocer, Gilberto Ramos

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores/as que publiquen en esta revista aceptan las siguientes condiciones:
- Los autores/as conservan los derechos de autor y ceden a la revista el derecho de la primera publicación, con el trabajo registrado con la licencia de atribución de Creative Commons 4.0, que permite a terceros utilizar lo publicado siempre que mencionen la autoría del trabajo y a la primera publicación en esta revista.
- Los autores/as pueden realizar otros acuerdos contractuales independientes y adicionales para la distribución no exclusiva de la versión del artículo publicado en esta revista (p. ej., incluirlo en un repositorio institucional o publicarlo en un libro) siempre que indiquen claramente que el trabajo se publicó por primera vez en esta revista.
- Se permite y recomienda a los autores/as a compartir su trabajo en línea (por ejemplo: en repositorios institucionales o páginas web personales) antes y durante el proceso de envío del manuscrito, ya que puede conducir a intercambios productivos, a una mayor y más rápida citación del trabajo publicado (vea The Effect of Open Access).