Study and experimental measurement of the drag coefficient of the hull of an underwater drone by means of a wind tunnel
DOI:
https://doi.org/10.37636/recit.v8n1e389Keywords:
Drag coefficient, Underwater dron hull, Wind tunnel, Complete similarityAbstract
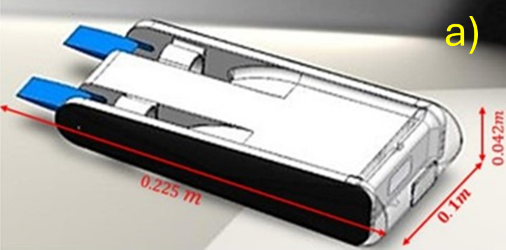
The present work aims to study, design and characterize the hull of a submarine drone by means of experimental measurement in a wind tunnel. For this purpose, the concept design of the prototype was carried out, which was built using additive manufacturing. The experimental runs were performed for two types of surfaces, flat and cylindrical, on the drone hull head. Using the Re determined the test velocities in air were 8, 10, 12, 14 and 16 m/s. From the experimental runs, the drag force, was measured, and from the adjustment, it was estimated that the bias error is less than 6%, so it can be said that the error in the measurements is acceptable, and the scaling of the results can be performed. The results of the drag coefficient showed the reduction by boundary layer growth and from the comparison of the planar and cylindrical gemetires on the dron hull head showed that the of the cylindrical surface is 33.14 and 10.71% larger compared to the of the planar surface. To validate in a better way the obtained results were copared with other designs of hull geometries have a lower , approximately 63.33%, therefore this design does not present the best result in drag comparison with these surfaces, in the comparison with drones that do not have hull and are geometries of rectangular section, 97.48% less drag, therefore it can be indicated that this design has a better performance in comparison with these geometries. Finally, it can be concluded that the geometry proposed in this study has the necessary length to reduce drag due to a boundary layer with a flat surface to have improved performance compared to drones that do not have hull.
Downloads
References
S. S. d C. Botelho, P. L. J. Drews Junior, M. da S. Figueiredo, C. H. D. Rocha, y G. L. Oliveira, “Appearance-based odometry and mapping with feature descriptors for underwater robots”, Journal of the Brazilian Computer Society, vol.15, pp.47–54, Sep. 2009. https://doi.org/10.1007/BF03194505 DOI: https://doi.org/10.1590/S0104-65002009000300005
E. Kelasidi, P. Liljebäck, K. Y. Pettersen, y J. T. Gravdahl, “Experimental investigation of efficient locomotion of underwater snake robots for lateral undulation and eel-like motion patterns”, Robotics and Biomimetics., vol. 2, pp. 1-27, Dec. 2015. https://doi.org/10.1186/s40638-015-0029-4 DOI: https://doi.org/10.1186/s40638-015-0029-4
Y.-C. Lin y D.N. Zhang, “Experimental and numerical investigations on undulatory motion of a soft-fin-based underwater robot”, Journal of Mechanics, vol. 38, pp. 273–283, Jul. 2022. https://doi.org/10.1093/jom/ufac021 DOI: https://doi.org/10.1093/jom/ufac021
S. Hotta, Y. Mitsui, M. Suka, N. Sakagami, y S. Kawamura, “Lightweight underwater robot developed for archaeological surveys and excavations”, ROBOMECH Journal, vol. 10, pp. 1-14, Jan. 2023.https://doi.org/10.1186/s40648-023-00240-4 DOI: https://doi.org/10.1186/s40648-023-00240-4
A. R. Chowdhury, V. Kumar, B. Prasad, R. Kumar, y S. K. Panda, “Kinematic study and implementation of a bio-inspired robotic fish underwater vehicle in a Lighthill mathematical framework”, Robotics and Biomimetics, vol. 1, pp. 1-16, Nov. 2014. https://doi.org/10.1186/s40638-014-0015-2 DOI: https://doi.org/10.1186/s40638-014-0015-2
P. R. Bandyopadhyay, “Maneuvering hydrodynamics of fish and small underwater vehicles”, Integrative and Comparative Biology, vol. 42, pp. 102–117, Feb. 2002. https://doi.org/10.1093/icb/42.1.102 DOI: https://doi.org/10.1093/icb/42.1.102
J. Panda, A. Mitra, y H.Warrior, “A review on the hydrodynamic characteristics of autonomous underwater vehicles”, Journal of Engineering for the Maritime Environment, vol. 235, pp. 15–29, Jan. 2020.https://doi.org/10.1177/1475090220936896 DOI: https://doi.org/10.1177/1475090220936896
N. M. Nouri, K. Mostafapour, y R. Bahadori, “An apparatus to estimate the hydrodynamic coefficients of autonomous underwater vehicles using water tunnel testing”, Review of Scientific Instruments, vol. 87, Jun. 2016.https://doi.org/10.1063/1.4950899 DOI: https://doi.org/10.1063/1.4950899
S. Mansoorzadeh y E. Javanmard, “An investigation of free surface effects on drag and lift coefficients of an autonomous underwater vehicle (AUV) using computational and experimental fluid dynamics methods”, Journal of Fluids and Structures, vol. 51, pp. 161–171, Nov. 2014. https://doi.org/10.1016/j.jfluidstructs.2014.09.001 DOI: https://doi.org/10.1016/j.jfluidstructs.2014.09.001
P. Jagadeesh, K. Murali, y V. G. Idichandy, “Experimental investigation of hydrodynamic force coefficients over AUV hull form”, Ocean Engineering, vol. 36, pp. 113–118, Jan. 2009.https://doi.org/10.1016/j.oceaneng.2008.11.008 DOI: https://doi.org/10.1016/j.oceaneng.2008.11.008
A. Sakaki, y M. Kerdaadi, “Experimental and numerical determination of the hydrodynamic coefficients of an autonomous underwater vehicle”, Scientific Journals of the Maritime University of Szczecin, Vol. 62, pp 124-135, Jun. 2020. https://doi.org/10.17402/427
F. U. Rehman, L. Huang, E. Anderlini, y G. Thomas, “Hydrodynamic modelling for a transportation system of two Unmanned Underwater Vehicles: Semi-empirical, numerical and experimental analyses”, Journal of Marine Science and Engineering, vol. 9, pp. 500, May. 2021.https://doi.org/10.3390/jmse9050500 DOI: https://doi.org/10.3390/jmse9050500
L. Hong, X. Wang, D. Zhang, y H. Xu, “Numerical study on hydrodynamic coefficient estimation of an underactuated underwater vehicle”, Journal of Marine Science and Engineering, vol. 10, pp. 1049, Jul. 2022. https://doi.org/10.3390/jmse10081049 DOI: https://doi.org/10.3390/jmse10081049
M. Z. Sener y E. Aksu, “The effects of head form on resistance performance and flow characteristics for a streamlined AUV hull design”, Ocean Engineering, vol. 257, pp. 1-13, Aug. 2022. https://doi.org/10.1016/j.oceaneng.2022.111630 DOI: https://doi.org/10.1016/j.oceaneng.2022.111630
X. Li, D. Zhang, M. Zhao, X. Wang, y Y. Shen, “Hydrodynamic analysis and drag-reduction design of an Unmanned Underwater Vehicle based on Computational Fluid Dynamics”, Journal of Marine Science and Engineering, vol. 12, pp. 1-26, Aug. 2024. https://doi.org/10.3390/jmse12081388 DOI: https://doi.org/10.3390/jmse12081388
J. Liu, Q. Yue, S. Wu y X. Yue., “Hydrodynamic shape optimization of an autonomous and remotely operated vehicle via a multi-surrogate model”, Brodogradnja, vol. 75, pp. 1–19, Mar. 2024. https://doi.org/10.21278/brod75301 DOI: https://doi.org/10.21278/brod75301
F. Ahmed, X. Xiang, H. Wang, G. Xiang, y S. Yang, “CFD-based lift and drag estimations of a novel flight-style AUV with bow-wings: Insights from drag polar curves and thrust estimations”, Journal of Marine Science and Application, vol. 23, pp. 352–365, May. 2024. https://doi.org/10.1007/s11804-024-00420-7 DOI: https://doi.org/10.1007/s11804-024-00420-7
L. Hong, X. Wang, y D.-S. Zhang, “CFD-based hydrodynamic performance investigation of autonomous underwater vehicles: A survey”, Ocean Engineering, vol. 305, pp. 1-22, Aug. 2024. https://doi.org/10.1016/j.oceaneng.2024.117911 DOI: https://doi.org/10.1016/j.oceaneng.2024.117911
H. Vardhan, D. Hyde, U. Timalsina, P. Volgyesi, y J. Sztipanovits, “Sample-efficient and surrogate-based design optimization of underwater vehicle hulls”, Ocean Engineering, vol. 311, pp. 1-14, Jul. 2024. https://doi.org/10.1016/j.oceaneng.2024.118777 DOI: https://doi.org/10.1016/j.oceaneng.2024.118777
H. Du, T. Yan, T. Sun, S. Liu, B. He, y X. Wei, “Study of CFD prediction and surface roughness effect on AUV hull resistance performance”, Journal of Marine Science and Technology, vol. 29, pp. 747-765, Aug. 2024. https://doi.org/10.1007/s00773-024-01011-5 DOI: https://doi.org/10.1007/s00773-024-01011-5
T. Gao, Y. Wang, Y. Pang, y J. Cao, “Hull shape optimization for autonomous underwater vehicles using CFD”, Engineering Applications of Computational Fluid Mechanics, vol. 10, pp. 599–607, Sep. 2016. https://doi.org/10.1080/19942060.2016.1224735 DOI: https://doi.org/10.1080/19942060.2016.1224735
Q. Li, Y. Cao, B. Li, D. M. Ingram, y A. Kiprakis, “Numerical modelling and experimental testing of the hydrodynamic characteristics for an open-frame remotely operated vehicle”, Journal of Marine Science and Engineering, vol. 8, pp. 688, Sep. 2020. https://doi.org/10.3390/jmse8090688 DOI: https://doi.org/10.3390/jmse8090688
F. White, Mecánica de fluidos, España, Interamericana de España: McGraw-Hill, 2004.
R. Fox y A. McDonald, Introducción a la mecánica de fluidos, México, Interamericana de México: McGraw-Hill,1995.
Y. Cengel y J. Cimbala, Mecánica de fluidos: fundamentos y aplicaciones, México, Interamericana de México: McGraw-Hill, 2006.
A. Mallios, P. Ridao, D. Rivas, M. Carreras y R. Carmilli, “Toward Autonomous Exploration in Confined Underwater Environments”, Journal of field robotics, vol.33, pp.994-1012, Nov. 2015. https://doi.org/10.1002/rob.21640 DOI: https://doi.org/10.1002/rob.21640
Downloads
Published
Issue
Section
Categories
License
Copyright (c) 2025 Jesús Eduardo Rivera López, José Luis Arciniega Martínez, Guadalupe Juliana Gutiérrez Paredes, César Francisco Rodríguez Hibert, Cristian Ariel Martínez Cabrera, Carlos Alfonso Juárez Navarro

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors who publish in this journal accept the following conditions:
The authors retain the copyright and assign to the journal the right of the first publication, with the work registered with the Creative Commons Attribution license 4.0, which allows third parties to use what is published as long as they mention the authorship of the work and the first publication in this magazine.
Authors may make other independent and additional contractual agreements for the non-exclusive distribution of the version of the article published in this journal (eg, include it in an institutional repository or publish it in a book) as long as they clearly indicate that the work it was first published in this magazine.
Authors are allowed and encouraged to share their work online (for example: in institutional repositories or personal web pages) before and during the manuscript submission process, as it can lead to productive exchanges, greater and more quick citation of published work (see The Effect of Open Access).
How to Cite