Automatización en la carga de material de fundición en una línea de maquinado
DOI:
https://doi.org/10.37636/recit.v228091Palabras clave:
Diseño de Concepto, Diseño de Detalle, Cinemática Directa, Dinámica, Manipulador Cartesiano, Diseño Mecánico Usando Software.Resumen
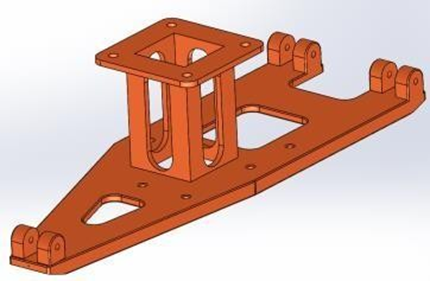
Este artículo describe la forma de cómo fue diseñado mecánicamente un manipulador cartesiano de tres grados de libertad, también de la manera de cómo fue diseñada la trayectoria y la determinación de las fuerzas necesarias para originar el movimiento. Se consideró estudiar la geometría del movimiento del manipulador con el fin de definir trayectorias, específicamente se usó el método de Denavit-Hartenberg también se empleó la ecuación de Euler-Lagrange para determinar las fuerzas internas que suceden dentro del sistema. Se determinaron las características técnicas de los componentes del manipulador empleando un software y mediante un proceso iterativo de análisis de esfuerzos, deformaciones y fatigas se eligieron las propuestas más viables.Descargas
Los datos de descargas todavía no están disponibles.
Citas
F. Reyes-Cortes. Robótica, control de robots manipuladores, Editorial Alfa Omega, México, primera edición, 2011. https://www.alfaomega.com.mx/default/catalogo/profesional/robotica-control-de-robots-manipuladores.html
R. L. Norton. Diseño de máquinas un enfoque integrado, Editorial Pearson, México, cuarta edición, 2011. https://www.pearsoneducacion.net/ecuador/tienda-online/dise%C3%B1o-maquinas-norton-4ed-ebook1
Publicado
2019-05-15
Cómo citar
Hernández Núñez, M., & Barraza Navarro, F. J. (2019). Automatización en la carga de material de fundición en una línea de maquinado. Revista De Ciencias Tecnológicas, 2(2), 80–91. https://doi.org/10.37636/recit.v228091
Número
Sección
Artículos de Investigación
Categorías
Licencia
Derechos de autor 2020 Mario Hernández Núñez, Francisco Javier Barraza Navarro

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores/as que publiquen en esta revista aceptan las siguientes condiciones:
- Los autores/as conservan los derechos de autor y ceden a la revista el derecho de la primera publicación, con el trabajo registrado con la licencia de atribución de Creative Commons 4.0, que permite a terceros utilizar lo publicado siempre que mencionen la autoría del trabajo y a la primera publicación en esta revista.
- Los autores/as pueden realizar otros acuerdos contractuales independientes y adicionales para la distribución no exclusiva de la versión del artículo publicado en esta revista (p. ej., incluirlo en un repositorio institucional o publicarlo en un libro) siempre que indiquen claramente que el trabajo se publicó por primera vez en esta revista.
- Se permite y recomienda a los autores/as a compartir su trabajo en línea (por ejemplo: en repositorios institucionales o páginas web personales) antes y durante el proceso de envío del manuscrito, ya que puede conducir a intercambios productivos, a una mayor y más rápida citación del trabajo publicado (vea The Effect of Open Access).