Desarrollo de un sistema mecatrónico para robot humanoide que permita emular el movimiento del cuello de los seres humanos
DOI:
https://doi.org/10.37636/recit.v213539Palabras clave:
Sistema Mecatrónico, Robot Humanoide, Modelo Dinámico, FPGA, WiFi.Resumen
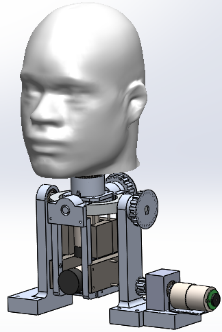
En el presente trabajo se muestra el diseño de un sistema mecatrónico, el cual emula los movimientos del cuello humano, ya que sostendrá la cabeza de un robot humanoide (Arthur) desarrollado por la empresa Hanson Robotics. El diseño mecánico se basa en un robot esférico de 3 grados de libertad (3-GDL), se desarrolla el modelo dinámico a través de las ecuaciones de movimiento de Euler-Lagrange. La etapa de control es una tarjeta de desarrollo FPGA (arreglos de compuertas programables en campo) de la familia Cyclone IV, la etapa de potencia se basa en transistores BJT, se implementa el controlador Tangente hiperbólico y una interfaz de comunicación WiFi para configurar el robot desde una PC con ayuda del software Labview. Como resultado se muestra la integración del sistema mecatrónico, la interfaz desarrollada junto con la comunicación FPGA-PC y control de posición. El trabajo futuro será la implementación del sistema en el robot humanoide.Descargas
Referencias
Hanson Robotics. (2016, 15 Marzo). Meet Arthur a Humanoid Robot (Hanson Robotic News). [Página web]. Disponible en: http://hansonrobotics.com/slate-fr-blogger-meets-arthur-dld-conference/
J. L. Guerra, Manual de fisioterapia (2a. ed.). Editorial El Manual Moderno, 2018. https://tienda.manualmoderno.com/manual-de-fisioterapia-9786074487107-9786074487190.html?SID=38b00ea117d111154a7fd6fe32c80c75&___store%5B_data%5D%5Bstore_id%5D=2&___store%5B_data%5D%5Bcode%5D=manual_moderno_mexico_mxn&___store%5B_data%5D%5Bwebsite_id%5D=2&___store%5B_data%5D%5Bgroup_id%5D=2&___store%5B_data%5D%5Bname%5D=Manual+Moderno+M%C3%A9xico&___store%5B_data%5D%5Bsort_order%5D=0&___store%5B_data%5D%5Bis_active%5D=1
F. Cortés, “Robótica: Control de Robots Manipuladores”, Alfaomega Grupo Editor, 1era. Edición, México, 2011. https://www.alfaomega.com.mx/default/robotica-control-de-robots-manipuladores-4645.html
Publicado
Número
Sección
Categorías
Licencia
Derechos de autor 2019 Francisco José López Cortés, Sergio Vergara Limón, María Aurora Diozcora Vargas Treviño, Amparo Dora Palomino Merina, David Eduardo Pinto Avedaño, Darnes Vilariño Ayala

Esta obra está bajo una licencia internacional Creative Commons Atribución 4.0.
Los autores/as que publiquen en esta revista aceptan las siguientes condiciones:
- Los autores/as conservan los derechos de autor y ceden a la revista el derecho de la primera publicación, con el trabajo registrado con la licencia de atribución de Creative Commons 4.0, que permite a terceros utilizar lo publicado siempre que mencionen la autoría del trabajo y a la primera publicación en esta revista.
- Los autores/as pueden realizar otros acuerdos contractuales independientes y adicionales para la distribución no exclusiva de la versión del artículo publicado en esta revista (p. ej., incluirlo en un repositorio institucional o publicarlo en un libro) siempre que indiquen claramente que el trabajo se publicó por primera vez en esta revista.
- Se permite y recomienda a los autores/as a compartir su trabajo en línea (por ejemplo: en repositorios institucionales o páginas web personales) antes y durante el proceso de envío del manuscrito, ya que puede conducir a intercambios productivos, a una mayor y más rápida citación del trabajo publicado (vea The Effect of Open Access).
Cómo citar