A feedforward-moment-gyro-control for positioning wirelessly light-source and wireless- camera in laparoscopic instruments
DOI:
https://doi.org/10.37636/recit.v111222Keywords:
Minimally Invasive, Robot Surgeon, Data Acquisition, Feedforward-Moment-Gyro-Control, Wireless Transceiver, Laparoscopy.Abstract
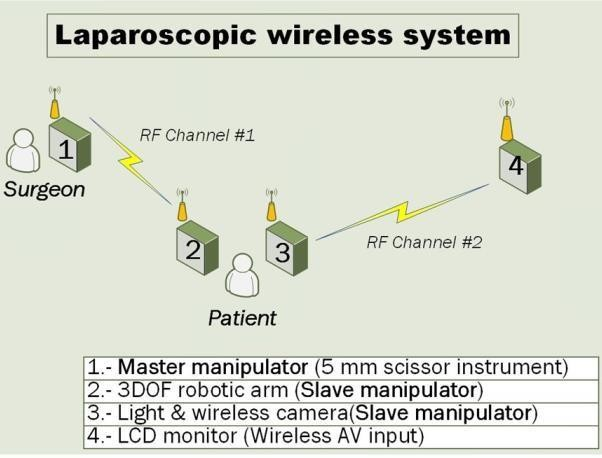
This article presents a gyroscopic mechatronic system, which helps the laparoscopic surgeon to wirelessly control the zoom and panoramic position of a camera and a light source, adapted to a manipulator for minimally invasive surgery. The gyroscope adapted to the manipulator generates a reference signal used by an open loop control. The camera and light source system are mounted on an electromechanical device (robotic arm) with three degrees of freedom (3DOF). Experiments performed with the system show good pan, tilt and zoom performance of the camera and light source. Success is measured by comparing an input signal from the voltage levels generated by a transducer with micro-electro-mechanical systems (MEMS), versus the signals for the angular positions of two servo-motors (pan and tilt) and zooming in or out of the camera by a DC motor.Downloads
References
Meng W, Liu Q, Zhou Z, Ai Q, Sheng B, & Xie SS. “Recent development of mechanisms and control strategies for robot- assisted lower limb rehabilitation,” Mechatronics. 31:132- 145, 2015. https://doi.org/10.1016/j.mechatronics.2015.04.005 DOI: https://doi.org/10.1016/j.mechatronics.2015.04.005
Ouyang X, Ding S, Fan B, Li PY, & Yang H. “Development of a novel compact hydraulic power unit for the exoskeleton robot,” Mechatronics. 38: 68-75, 2016. https://doi.org/10.1016/j.mechatronics.2016.06.003 DOI: https://doi.org/10.1016/j.mechatronics.2016.06.003
Wu J, Gao J, Song R, Li R, Jiang L. “The design and control of a 3DOF lower limb rehabilitation robot,” Mechatronics, vol. 33, pp. 13-22, 2016. https://doi.org/10.1016/j.mechatronics.2015.11.010 DOI: https://doi.org/10.1016/j.mechatronics.2015.11.010
Blanes C, Mellado M, Beltrán P. “Tactile sensing with accelerometers in prehensile grippers for robots,” Mechatronics, vol. 33, pp. 1-12, 2016. https://doi.org/10.1016/j.mechatronics.2015.11.007 DOI: https://doi.org/10.1016/j.mechatronics.2015.11.007
Abir J, Longo S, Morantz P, Shore P. “Optimized estimator for real-time dynamic displacement measurement using accelerometers.” Mechatronics, vol.39, pp.1- 11, 2016. https://doi.org/10.1016/j.mechatronics.2016.07.003 DOI: https://doi.org/10.1016/j.mechatronics.2016.07.003
Mishra R, Lorias D, Minor A. “Comparison of PMAT camera holder with human camera holder,” World Journal of Laparoscopic, vol. 1, no. 2, pp. 1-5, 2008. https://doi.org/10.5005/jp-journals-10007-1049 DOI: https://doi.org/10.5005/jp-journals-10007-1049
Wagner A, Varkarakis I, Link R, Sullivan W, Su L. “Comparison of surgical performance during laparoscopic radical prostatectomy of two robotic camera holders,” EndoAssist and AESOP; a pilot study, vol. 68, no. 1, pp. 70-74, 2006. https://doi.org/10.1016/j.urology.2006.02.003 DOI: https://doi.org/10.1016/j.urology.2006.02.003
Pugin F, Bucher P, Morel P. “History of robotic surgery: from AESOP and Zeus to da Vinci,” Journal of visceral surgery, vol. 148, no. 5, pp. 3-8, 2011. https://doi.org/10.1016/j.jviscsurg.2011.04.007
Kim J, Lee Y, Ko S, Kwon D. “Compact camera assistant robot for minimally invasive surgery: KaLAR,” in Proc. IEEE/RSJ International Conference, 2004, pp. 2587-2592. https://doi.org/10.1109/IROS.2004.1389798. DOI: https://doi.org/10.1109/IROS.2004.1389798
Pugin F, Bucher P, Morel P. “History of robotic surgery. AESOP and Zeus to da Vinci,” Journal of visceral surgery, vol. 148, no. 5, pp. 3-8, 2011. https://doi.org/10.1016/j.jviscsurg.2011.04.007 DOI: https://doi.org/10.1016/j.jviscsurg.2011.04.007
Liu X, Mancini G, Tan J. “Design and analysis of a magnetic actuated capsule camera robot for single incision laparoscopic surgery,” in Proc. IEEE/RSJ International Conference, 2015, pp. 229-234. https://doi.org/10.1109/IROS.2015.7353379 DOI: https://doi.org/10.1109/IROS.2015.7353379
Bajo A, Goldman R, Wang L. “Integration and preliminary evaluation of an insertable robotic effectors platform for single port access surgery,” in Proc. IEEE International Conference, 2012, pp. 3381-2287. https://doi.org/10.1109/ICRA.2012.6224986 DOI: https://doi.org/10.1109/ICRA.2012.6224986
Luo R, Wang J, Tsai J, Lee K. “Robotic Flexible Laparoscope with position retrieving system for assistive minimally invasive surgery,” IEEE/RSJ International Conference, 2015, pp. 2014-2029. https://doi.org/10.1109/IROS.2015.7353645 DOI: https://doi.org/10.1109/IROS.2015.7353645
Hurteau R, DeSantis S, Begin E. “Laparoscopic surgery assisted by a robotic cameraman: concept and experimental results,” in Proc. IEEE International Conference Robotics and Automation, 1994, pp. 2286- 2289. https://doi.org/10.1109/ROBOT.1994.350945 DOI: https://doi.org/10.1109/ROBOT.1994.350945
Yoshida M, Furukawa T, Morikawa Y, Kitagawa Y. “The developments and achievements of endoscopic surgery, robotic surgery and function-preserving surgery,” Japanese Journal of clinical oncology, vol. 40, no. 9, pp. 863-869, 2010. https://doi.org/10.1093/jjco/hyq138 DOI: https://doi.org/10.1093/jjco/hyq138
García O, Olvera H, Beltrán J. “Telemedicina y cirugía robótica en ginecología,” Ginecol Obstet Mex, vol. 76, no. 3, pp. 161-166, 2008. https://www.medigraphic.com/cgi-bin/new/resumen.cgi?IDARTICULO=19397
Cavusoglu M. “Intelligent control algorithms for robotic-assisted beating heart surgery,” Robotics, vol. 23, no. 3, pp. 468-480, 2007. https://doi.org/10.1109/TRO.2007.895077 DOI: https://doi.org/10.1109/TRO.2007.895077
Feng Y, Fuentes D. “Model-based planning and real-time predictive control for laser-induced thermal therapy,” International Journal of Hyperthermia, vol. 27, no. 8, pp.751- 761, 2011. https://doi.org/10.3109/02656736.2011.611962 DOI: https://doi.org/10.3109/02656736.2011.611962
Ardavan M, Schmitt K. “A preliminary assessment of EMI control policies in hospitals,” in Proc. Antenna Technology and Applied Electromagnetics, 2010, pp.1-6. https://doi.org/10.1109/ANTEM.2010.5552553 DOI: https://doi.org/10.1109/ANTEM.2010.5552553
Tan K, Hinberg I. “Radiofrequency susceptibility tests on medical equipment,” in Proc. 16th Annual International Conference of the IEEE, 1994, pp. 998-999. https://doi.org/10.1109/IEMBS.1994.415252 DOI: https://doi.org/10.1109/IEMBS.1994.415252
Van Der Togt R, Van Lieshout EJ, Hensbroek R, Beinat E, Binnekade JM, Bakker PJM. “Electromagnetic interference from radio frequency identification inducing potentially hazardous incidents in critical care medical equipment,” Jama, vol. 299 no. 24, pp. 2884- 2890, 2008. https://doi.org/10.1001/jama.299.24.2884 DOI: https://doi.org/10.1001/jama.299.24.2884
Chang M, Cheng C, Huang H. “Wireless multi- channel near-infrared spectroscopy for monitoring middle cerebral artery occlusion,” IEEE/SICE International Symposium System Integration, 2011, pp. 1072-1077. https://doi.org/10.1109/SII.2011.6147598 DOI: https://doi.org/10.1109/SII.2011.6147598
Cavusoglu M, Rotella J, Newman W. “Control algorithms for active relative motion cancelling for robotic assisted off-pump coronary artery bypass graft surgery,” in Proc. 12th International Conference, 2005, pp. 431-436. https://doi.org/10.1109/ICAR.2005.1507446 DOI: https://doi.org/10.1109/ICAR.2005.1507446
Ting K, Ee G, Ng C, Noordin N. “The performance evaluation of IEEE 802.11 against IEEE 802.15. 4 with low transmission power,” in Proc. 17th Asia-Pacific Conference Communication, 2011, pp. 850-855.
https://doi.org/10.1109/APCC.2011.6152927 DOI: https://doi.org/10.1109/APCC.2011.6152927
Chen CH, Chang H, Liu TP, Huang CH. “Application of wireless electrical non- fiberoptic endoscope: Potential benefit and limitation in endoscopic surgery,” International Journal of Surgery, vol. 19, pp. 6-10, 2015.
https://doi.org/10.1016/j.ijsu.2015.05.003 DOI: https://doi.org/10.1016/j.ijsu.2015.05.003
Periyasamy M, Dhanasekaran R. “Electromagnetic interference on critical medical equipments by RFID system,” in Proc. Communications and Signal Processing (ICCSP), 2013, pp. 668-672. https://doi.org/10.1109/iccsp.2013.6577139 DOI: https://doi.org/10.1109/iccsp.2013.6577139
Agrawal OP. “Formulation of Euler–Lagrange equations for fractional variational problems” Journal of Mathematical Analysis and Applications, vol. 272, no. 1, pp. 368-379, 2002. https://doi.org/10.1016/S0022- 247X(02)00180-4 DOI: https://doi.org/10.1016/S0022-247X(02)00180-4
Carlos J. “Adquisición de datos con Arduino I: Tiempo de muestreo y Resolución”: https://booleanbite.com/web/adquisicion-de-datos-con-arduino-i-tiempo-de-muestreo-y-resolucion/ 2015 [Mar. 18, 2015].
Published
Issue
Section
Categories
License
Copyright (c) 2018 Torres-Ventura Jose, Reyna Carranza Marco Antonio, Rascón Carmona Raul, Bravo-Zanoguera Miguel Enrique, López-Avitia Roberto

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors who publish in this journal accept the following conditions:
The authors retain the copyright and assign to the journal the right of the first publication, with the work registered with the Creative Commons Attribution license 4.0, which allows third parties to use what is published as long as they mention the authorship of the work and the first publication in this magazine.
Authors may make other independent and additional contractual agreements for the non-exclusive distribution of the version of the article published in this journal (eg, include it in an institutional repository or publish it in a book) as long as they clearly indicate that the work it was first published in this magazine.
Authors are allowed and encouraged to share their work online (for example: in institutional repositories or personal web pages) before and during the manuscript submission process, as it can lead to productive exchanges, greater and more quick citation of published work (see The Effect of Open Access).
How to Cite