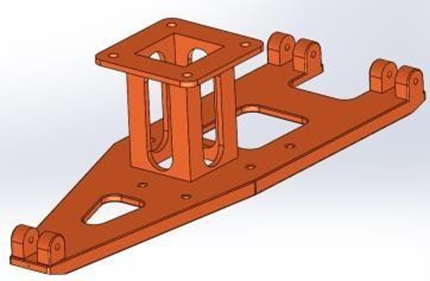
Automation in the loading of foundry material in a machining line
DOI:
https://doi.org/10.37636/recit.v228091Keywords:
Concept Design, Detail Design, Direct Kinematics, Dynamic, Cartesian Manipulator, Mechanical Design Using Software.Abstract
This article describes the way how a Cartesian manipulator of three degrees of freedom was mechanically designed, as well as the way in which the trajectory was designed and the forces needed to originate the movement. It was considered to study the geometry of the manipulator´s movement in order to define trajectories, specifically the Denavit- Hartenberg method was used, and the Euler-Lagrange equation was also used to determine the internal forces that occur within the system. The technical characteristics of the components of the manipulator were determined using software and through an iterative process of analysis of stress, deformations and fatigues, the most viable proposals were chosen.Downloads
References
F. Reyes-Cortes. Robótica, control de robots manipuladores, Editorial Alfa Omega, México, primera edición, 2011. https://www.alfaomega.com.mx/default/catalogo/profesional/robotica-control-de-robots-manipuladores.html
R. L. Norton. Diseño de máquinas un enfoque integrado, Editorial Pearson, México, cuarta edición, 2011. https://www.pearsoneducacion.net/ecuador/tienda-online/dise%C3%B1o-maquinas-norton-4ed-ebook1
Downloads
Published
Issue
Section
Categories
License
Copyright (c) 2020 Mario Hernández Núñez, Francisco Javier Barraza Navarro

This work is licensed under a Creative Commons Attribution 4.0 International License.
The authors who publish in this journal accept the following conditions:
The authors retain the copyright and assign to the journal the right of the first publication, with the work registered with the Creative Commons Attribution license 4.0, which allows third parties to use what is published as long as they mention the authorship of the work and the first publication in this magazine.
Authors may make other independent and additional contractual agreements for the non-exclusive distribution of the version of the article published in this journal (eg, include it in an institutional repository or publish it in a book) as long as they clearly indicate that the work it was first published in this magazine.
Authors are allowed and encouraged to share their work online (for example: in institutional repositories or personal web pages) before and during the manuscript submission process, as it can lead to productive exchanges, greater and more quick citation of published work (see The Effect of Open Access).
How to Cite